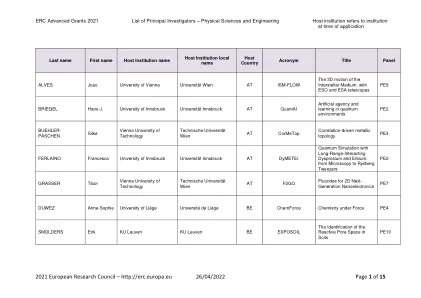
XiaoMi-AI文件搜索系统
World File Search System主机
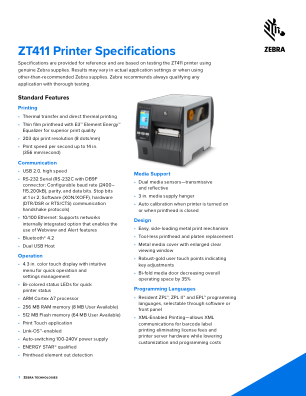
ZT411 打印机规格
• 以可打印的 ASCII 字符进行通信 • 符合 Unicode™ 标准 • 与大型机、小型机和 PC 主机兼容 • 可下载对象包括图形、可缩放和位图字体、标签模板和格式 • 可调整的打印缓存 • 数据压缩 • 打印时自动为格式分配内存 • 字段自动序列化 • 格式反转(黑底白字) • 镜像打印 • 四位置字段旋转(0º、90º、180º、270º) • 旋转命令 • 可编程标签数量,具有打印、暂停、剪切控制 • 根据请求向主机发送状态消息
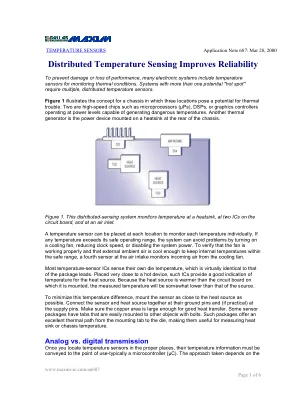
应用说明 > 温度传感器 - Thierry LEQUEU
MAX6625 连续测量温度,每 133ms 更新一次 8 位加号输出。主机处理器可随时通过 2 线总线读取温度。当温度超过主机编程阈值时,MAX6625 可在开漏输出 (O.T.端子) 上产生中断。此比较器功能的滞后也可编程,使 MAX6625 能够忽略微小的温度变化。要在主机不进行持续读取的情况下监控多个位置的潜在热问题,请将多个 MAX6625 的中断线连接到一条带有公共上拉电阻的轨迹上。MAX6625 的微型 6 引脚 SOT23 封装允许靠近热源,即使在紧密封装的电路板上也是如此。标准串行接口并不是多个传感器传输数据的唯一方式。例如,MAX6575 产生的逻辑输出的时间延迟与温度成比例。简单的基于时间延迟的复用方案允许您将多达八个 MAX6575 连接到单个 µC I/O 引脚。

4000/7000 DLT 桌面系列安装和操作指南
其他要求 .......................。。。。。。。。。。。。。。。。。。。。。。。。。。。。.2-11 SCSI 主机适配器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。........2-11 SCSI 接口电缆 ..............。。。。。。。。。。。。。。。。。。。。。。。。..........2-12 应用软件 .............。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.2-12


ENS160 | ScioSense
这样可实现卓越的选择性、准确性和快速响应,且不会给主机系统带来额外的处理负荷。数字原始传感器输出可用于算法定制。LGA 封装设备提供 SPI 或 I²C 从属接口,并为主机通信提供单独电源。ENS160 是一款经过验证的免维护解决方案,专为大批量生产和可靠性而设计,由 MEMS 气体传感的先驱之一设计,回顾二十年的气体传感器设计,迄今为止已出货超过 5000 万台。
现在文档
9 使用管理系统 57 9.1 使用主机运行您的第一个实验 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60 9.4 添加参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...

tpdnet:用于嵌入式机器学习处理器组的微小学生检测神经网络Ethos-u55
摘要。增强现实和虚拟现实(AR/VR)系统包含几个不同的传感器,包括用于手势认可的图像传感器,头姿势跟踪和瞳孔/眼睛跟踪。所有这些传感器的数据必须由主机处理器实时处理。对于未来的AR/VR系统,需要新的传感技术来满足功耗和性能的需求。当前的学生进行分辨率约300x300像素及以上的图像进行。因此,深神经网络(DNN)需要主机平台,这些平台能够通过此类输入分辨率计算DNN来实时处理它们。在这项工作中,将瞳孔检测的图像分辨率优化为100x100像素的分辨率。引入了一个微小的学生检测神经网络,可以使用ARM Cortex-M55和嵌入式机器学习(ML)Proces-sor Arm Ethos-U55处理,其性能为每秒189帧(FPS),并且检测率很高。这允许减少图像传感器和主机之间的通信功耗,以获取未来的AR/VR设备。