XiaoMi-AI文件搜索系统
World File Search System交通标志
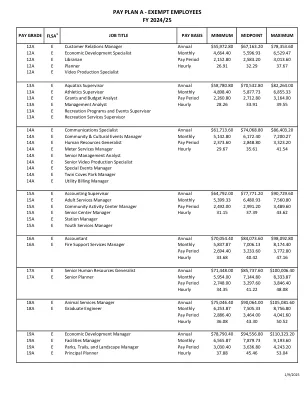
薪酬计划 A - 2024/25 财年免税员工
39B N 动物服务官员 年薪 $42,390.40 $50,876.80 $59,342.40 39B N 法院协调员-少年案件经理 月薪 3,532.53 4,239.73 4,945.20 39B N 拘留服务官员 薪资期 1,630.40 1,956.80 2,282.40 39B N 设施维护技术员 II 每小时 20.38 24.46 28.53 39B N 现场采样技术员 39B N 车队服务技术员 39B N 警察军需官 39B N 财产与证据技术员 39B N 高级维护工人 - 排水和通行权 39B N 高级维护工人 - 公园服务 39B N 高级维护工人 - 街道服务 39B N 高级维护工人 - 公用事业运营 39B N 高级仪表服务技术员 39B N 交通标志和标线技术员 39B N 公用事业计费技术员
交通工程规划 (TEP) 审查提交要求 主管部门 修订市政法规 第 49 条 目的 A 交通工程
开发工程服务要求任何符合以下一项或多项标准或由 DES 工程师酌情决定的项目提交 TEP 并获得批准: 改变用途会对通行权产生额外影响。 修改场地通道。 改变路缘和排水沟、人行道、车道或路缘坡道的位置。 修建 100 英尺或更长的连续直线长度的路缘和排水沟、人行道或小巷, 在 DES 定义的州公路或主干道上修建。 在 ROW 内修建新的街道或人行照明。 修建中间带或加速/减速车道,或改变街道车道宽度。 修建新的交叉口控制(停车标志、信号、环形交叉路口等)。 项目影响 ROW 内的路面标记或交通标志,但垂直公用设施服务连接除外。 项目交通研究表明,除了上述情况外,ROW 还需要进行重大改进。

自动驾驶汽车模拟
摘要该项目着重于为自动驾驶汽车开发基于JavaScript的模拟,利用该语言的多功能性和广泛使用。模拟环境复制了各种要素,例如道路,交叉点,交通标志,行人和车辆,允许进行现实的测试和开发。关键方面包括用于生成道路网络的算法,定义交通模式以及模拟天气等环境因素。对车辆动力学的准确建模,包括加速,制动和轮胎摩擦等因素至关重要。悬浮动力学,牵引力控制和稳定性的整合增强了算法测试的现实主义。传感器模拟,模拟激光雷达,雷达和摄像机对于测试感知算法和评估系统鲁棒性至关重要。合成传感器数据生成促进了在不同条件下的测试,并有助于标记的机器学习模型培训的数据集,从而弥合虚拟仿真和现实世界部署之间的差距。关键字: - 神经网络,仿真,计算机视觉,映射

更安全的驾驶体验的全自动视觉注意估计支持系统
抽象驾驶员的注意是安全驾驶和避免可能发生事故的关键要素。在本文中,我们提出了一种新的方法,可以解决驱动程序中视觉注意力估计的任务。我们引入的模型由两个分支组成,一个分支执行凝视点检测以确定驾驶员的确切焦点,另一个执行对象检测以识别道路上的所有相关元素(例如车辆,行人和交通标志)。两个分支的两个输出的组合使我们能够确定驾驶员是否专注,并最终确定他们集中的道路元素。测试了两个模型的目光检测任务:GAZECNN模型和由CNN+变压器组成的模型。对两种模型的性能进行了评估,并将其与其他最先进的模型进行比较,以选择最佳的任务方法。最后,报告并分析了DGAZE数据集上3761对图像(驱动程序视图和相应的道路视图)进行的视觉注意估计结果。
单元9的可持续智能运输系统的未来
9.1连接车辆简介9.2什么是连接车辆?9.2.1连接类型9.2.2连接车辆的功能9.2.3 IOT工作中连接的车辆的示例9.2.4连接的车辆挑战9.3跟踪的车辆位置9.4车辆诊断分析9.5车辆诊断分析9.5车辆信息启动系统9.6智能手机连接9.6. 6. 6.6.智能管理9.7.7智能手机连接9.7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7 7.7路线平面蛋白5G 9.9分析9.10基础设施升级需求CAVS 9.10.1道路标记和交通标志9.10.2关于事件和道路工程的通信9.10.3数字通信9.10.4路面结构9.10.110.5路线9.10.6停车场9.10.10.10.110.110.110 9.110 9.110 9.110 9.8 Brid 9.8 Brid 9.8 Brid 9.8 9.12关键字和说明9.13参考和进一步阅读

自主驾驶中场景理解的因果知识图
驾驶是一项复杂的活动,需要仔细计划和持续关注。人类驾驶员根据观察结果,过去的经验以及对潜在情景和必要行动的期望来分析其周围环境。尽管对观测数据进行了自动驾驶培训,但它们面临着陌生,不确定和冒险的驾驶情况的挑战。这些车辆在具有各种元素的环境中运行,例如交通标志,行人和其他车辆。了解这些要素之间的关系和互动对于在不同情况下理解自动驾驶汽车的行为至关重要。要实现5级完整驾驶自动化,这需要一个能够在没有人工干预的情况下处理所有驾驶任务的系统,人工智能(AI)模型需要高质量的表示,发现以及对驾驶场景中元素之间因果关系的理解1。在因果关系(CBN)[1]中表达的对因果关系的理解将受益于知识图(kg)中的明确表示。这个想法提出了许多重要的研究问题。在驾驶场景中,基于CBN的因果关系可以帮助理解广告场景吗?可以在KG中使用基于CBN的因果表示执行干预和反事实推理,例如确定特定的

使用CNN
和技术(A),Rajahmundry,AP,印度。摘要 - 本文集中于开发基于软件的识别模块,该模块与车辆的板载摄像头系统集成在一起。使用OPENCV,系统通过调整,颜色归一化和边缘检测来预处理图像。经过Tensorflow,Keras和Image Data Generator训练的卷积神经网络(CNN),通过增强和预处理流量符号数据集来增强分类精度。一旦确定了流量标志,就可以使用文本到语音转换提供实时语音反馈,从而使驾驶员可以在不分散注意力的情况下接收警报。使用Django构建的后端管理整个管道,确保无缝处理,模型执行和用户交互。结果表明,即使在不同的照明和天气条件下,系统也可以准确识别流量标志,并且可以正确识别并实时宣布交通标志。通过将基于CNN的图像识别与语音反馈相结合,该系统大大改善了驾驶员的帮助,从而使驾驶更安全。索引术语 - 流量标志识别,卷积神经网络(CNN),图像数据生成器,OPENCV,深度学习,实时检测,语音帮助,计算机视觉,机器学习,Django,Tensorflow,Tensorflow,Keras,Keras,驾驶员帮助,道路安全,道路安全。
人工智能助力 H&E 复兴
深度学习 (DL) 是人工智能的一个子领域,它充分利用了人工神经网络的潜力,尤其是具有多个非线性“深层”的卷积神经网络 (CNN),在解决基于图像的问题方面取得了巨大成功 [2]。例如,CNN 已成功识别人脸、交通标志和物体、汽车、动物,使机器人和自动驾驶汽车具有视觉功能,最近,它还使医疗应用具有视觉功能。这些神经网络在多个分类和分割任务中表现出了人类水平的性能。CNN 的性能通常通过准确度、灵敏度、特异性、精确度、召回率(也称为真阳性率 (TPR))和假阳性率 (FPR)(等于 1 - 特异性)来评估。实际上,TPR 和 FPR 之间总是存在权衡,就像在医学领域经常面临的灵敏度和特异性之间的权衡一样,必须在训练模型的性能中找到假阳性和假阴性之间的平衡。例如,可以绘制接收者操作特性曲线(ROC 曲线),即在不同分类阈值下绘制 TPR 与 FPR 的曲线,然后可以找到一个在 TPRi 和 FPRi 之间达到令人满意的平衡的操作点(TPRi、FPRi)。为了使用单一性能指标(曲线下面积 (AUC))评估和比较经过训练的 AI 模型的性能,整个

驾驶基础理论
A 部分:驾驶执照简介 3 什么是驾驶执照? 3 驾驶能力 3 驾驶执照的等级 3 驾驶能力测试 4 临时驾驶执照 (PDL) 4 驾驶执照的有效期 4 “新”驾驶员 5 驾驶员改进积分系统 (DIPS) 5 体检 7 在线门户 8 B 部分(将在基础理论考试中进行测试) 标志和信号 强制性标志 9 禁止标志 11 警告标志 14 监管标志 19 信息标志 21 人行横道标志 24 隧道交通标志 25 脚踏自行车标志 26 方向标志 27 高速公路监控和咨询系统 (EMAS) 29 设施标志 34 车辆标记 34 常见道路标记 35 方向箭头 43 合并箭头标记 43 信号(交通信号灯) 44 信号(道路上) 46 警官发出的信号 47 手势 49 交通规则和条例 靠左行驶规则 50 车道纪律 50 超车 50 霸占道路 52 速度限制 52 道路交叉口的“让路”规则 52 环形交叉路口 53 在高速公路上行驶 54 黄框交叉路口 54 调头 56 停车和泊车 56 安全带 57 灯光 57 酒精 58 轻型货车 58