XiaoMi-AI文件搜索系统
World File Search System人行

从自然互动和大型语言模型中对人形机器人行为的增量学习
摘要 - 自然语言对话框是直观人类机器人相互作用的关键。,它不仅可以用来表达人类的意图,而且可以传达改进的指示,如果机器人无法正确理解命令。非常重要的是,将机器人赋予以渐进的方式从这种互动经验中学习的能力,以使他们能够改善自己的行为或避免将来犯错。在本文中,我们提出了一个系统,以从自然相互作用中实现复杂行为的增量学习,并证明其在人形机器人上的实现。基于最新进展,我们提出了一个系统,该系统基于使LLM能够在交互式控制台中生成Python语句以调用机器人感知和动作的互动式陈述的想法,从而将大型语言模型(LLMS)用于机器人行为的高级编排。通过将人类指示,环境观察和执行结果馈送到LLM,从而封闭了交互环路,从而告知下一个陈述的生成。具体来说,我们引入了增量提示学习,这使系统能够从错误中进行交互学习。为此,LLM可以将另一个负责基于人类反馈的当前交互的LLM调用。然后将改进的交互作用保存在机器人的内存中,从而在类似的请求中检索。我们将系统集成到人形机器人ARMAR-6的机器人认知结构中,并通过证明广义的渐进学习知识来定量(模拟)和定性(模拟和现实世界中)评估我们的方法。

2024年国家残疾人行动计划更新
第 1 季度 第 2 季度 第 3 季度 第 4 季度 指示性成本 $ 目标 1 在 Te Pūkenga 网络中与残疾 Ākonga 建立牢固的伙伴关系 倡议 1 50k 倡议 2 50k 倡议 3 100k 目标 2 在 Te Pūkenga 网络中树立残疾人信心 倡议 1 200k 倡议 2 300k 目标 3 确保残疾 Ākonga 获得正确的学习支持 倡议 1 200k 倡议 2 200k 倡议 3 10k 倡议 4 10k 目标 4 以其他形式和使用辅助技术为有需要的残疾 ākonga 提供信息和通信访问 倡议 1 10k 倡议 2 10k 倡议 3 10k 目标 6 为遭受焦虑和精神困扰的 ākonga 提供有效支持 倡议 1 50k 总计 1,200k

国家有机计划(NOP)气候智能农业人行横道
气候 - 智能农业和林业(CSAF)是一种综合方法,它使农民,牧场主和森林土地所有者通过减少或删除温室气(GHG)排放(缓解)以及适应和建筑恢复能力(适应)来应对气候变化,同时可持续提高农业生产力和incrivitural Productity and Incrivitural and Incomess。国家有机计划(NOP)创建了此文档,以突出有机生产与CSAF缓解活动之间的联系,这些活动已证明可以隔离碳和/或减少温室气体排放。出于此表的目的,实践定义为美国农业部的国家资源保护局(NRCS)保护惯例,涉及2023财年的气候农业和林业缓解活动清单。在USDA的气候智能商品公告的合作伙伴关系中也引用了这些实践,作为具有竞争性降低气候利益的高度竞争项目的标准。
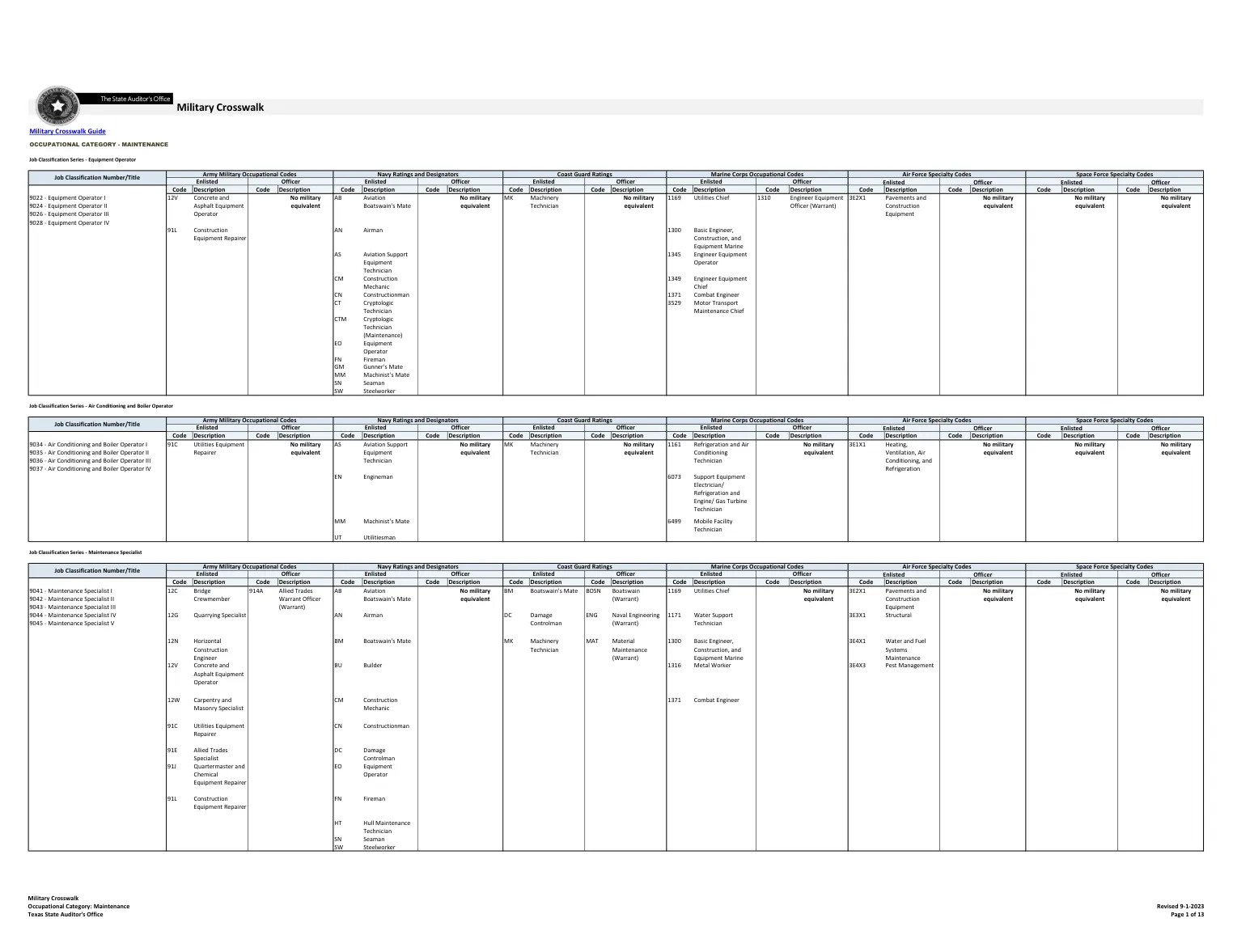
军事人行横道职业类别 - 维护
代码描述 代码描述 代码描述 代码描述 代码描述 代码描述 代码描述 代码描述 代码描述 代码描述 代码描述 代码描述 6276 固定翼飞机装载长,KC-130 6281 固定翼飞机安全设备机械师实习生 6282 固定翼飞机安全设备机械师,AV-8/TAV-8 6283 固定翼飞机安全设备机械师,EA-6 6286 固定翼飞机安全设备机械师,KC-130/V-22 6287 固定翼飞机安全设备机械师,F/A-18 6288 固定翼飞机安全设备机械师,F-35 6314 航空电子/维护技术员,无人机系统 (UAS)
军用人行横道(职业类别 - 安全)
2023 年 9 月 1 日 — 海上行动 5713 化学、生物、。放射学和。核 (CBRN)。响应者。8012 地面安全。官员。1Z1X1。伞兵救援。43HX 公共卫生。

公共卫生认证的个人行动计划(...
☐公共卫生的基于证据的方法☐法律与伦理学☐卫生公平和社会努力☐公共卫生生物学和疾病风险☐公共卫生中的政策☐合作和伙伴关系☐计划计划和计划计划和评估计划管理。
威尔明顿人行计划更新| 2023
2009年:威尔明顿采用了第一个步行威尔明顿的行人计划。 2012:在《 21世纪法案》(MAP-21)中取得进步的进展已签署为法律,为行人项目提供了联邦资金机会。。2009年:威尔明顿采用了第一个步行威尔明顿的行人计划。2012:在《 21世纪法案》(MAP-21)中取得进步的进展已签署为法律,为行人项目提供了联邦资金机会。2013:威尔明顿采用了威尔明顿/新汉诺威县综合绿道计划。2014年:选民批准了一项城市运输债券,该债券资助了足迹,人行道,自行车道和人行横道。2015年:联邦修复美国地面运输法(FAST)法案已签署为法律,为行人项目提供了联邦资金机会,直到2020年。2019年:在全国范围内的行人撞车事故,伤亡和死亡人数增加的情况下,威尔明顿经历了北卡罗来纳州大城市的行人坠机率最高。2021:威尔明顿和NCDOT启动了全市的行人安全研究;该市要求NCDOT的资金更新Wall Wilmington; 《基础设施投资与就业法案》(IIJA)已签署为法律,为行人项目提供了联邦资金机会,直到2026年。2023:威尔明顿采用了更新的步行威尔明顿行人计划。

人工智能辅助决策中三个臭皮匠是否比一个人好?人机协作再犯风险评估中群体和个人行为和表现的比较
随着人工智能辅助决策的普及,一个比经典问题“三个臭皮匠顶个诸葛亮”更有意义的问题是,在人工智能辅助决策中,群体的行为和表现与个人相比如何。在本文中,我们进行了一个案例研究,从决策准确性和信心、依赖人工智能的适当性、对人工智能的理解、决策公平性和承担责任的意愿六个方面比较了群体和个人在人机协作再犯风险评估中的表现。我们的研究结果表明,与个人相比,群体更多地依赖人工智能模型,而不管其正确性如何,但当他们推翻错误的人工智能建议时,他们会更有信心。我们还发现,根据准确性平等标准,群体比个人做出的决策更公平,并且当人工智能做出正确的决策时,群体愿意给予人工智能更多的信任。最后,我们讨论了我们工作的影响。
自治系统、私人行为者、外层空间和战争
公司“Made in Space Inc”已与美国国家航空航天局(NASA)签约,在太空中生产 3D 打印材料,10 而 SpaceX 的“奋进号”可重复使用的载人龙飞船于 2021 年 4 月第二次代表 NASA 访问国际空间站。11 此外,与本文的主题一致,值得注意的是,当前太空技术的发展包括自主操作的机器。随着火箭推进技术的发展超越了人类的反应时间 12 并且航天器在地球信号范围之外航行,技术进步使得这种自主性成为必要。13 自主飞行器将越来越成为人类太空探索和利用的重要组成部分,包括在武装冲突时期。太空中自主系统的行为(包括商业太空提供商的行为)在理论上可能构成使用武力,并将相关国家拖入国际武装冲突的局面。这种可能性强调了各国需要找到方法来监控和规范这些活动,以避免任何此类后果。