XiaoMi-AI文件搜索系统
World File Search System代数
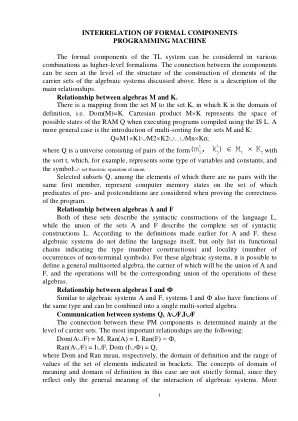
正式组件的相互关系-I.Kashirin
在通用代数的操作属性中,习惯是基于两个具有某些出色属性的常数突出显示属性。这些常数称为零(0)和一(1)。在不同的代数中,它们可能具有不同的符号,但其性质相同。必须有一个对零的操作,这使得表达式有效(x,0)= 0。对于一个单元,在一般情况下,使用逆元素的概念。按照它,在每个元素x的代数中,必须有一个反元素x-1,以便以下语句为真:(x,x,x-1)=1。较弱的属性是属性(x,1)= x。此属性无法确定确切的单元,但通常对于研究代数陈述的转换通常是有用的,在可编程机器的情况下,这是与程序相对应的正式表达式。常数为零,通常将其区分为0位操作,以确定代数的类型。

2024年春季新泽西州学生学习评估,数学和科学和新泽西州毕业能力评估评估
本备忘录为2024年春季的新泽西州学生学习评估(NJSLA)管理(ELA),数学和科学以及新泽西州新泽西州毕业能力评估(NJGPA)的新泽西学生学习评估(NJSLA)提供了关键日期和信息。谁必须测试NJSLA?对于ELA,预计三年级至九年级的学生将根据当前的年级入学率参加NJSLA,而不是本学年期间获得的教学水平。对于数学,预计三至五年级的小学生将根据当前的年级水平参加NJSLA。中学生六年级至八年级的学生有望根据当前的年级级别参加NJSLA,除非他们参加任何高中数学课程(即代数I,几何或代数II)。 注意:入学为期一年的代数I课程的6年级学生必须接受代数I评估和6级NJSLA数学评估。 所有高中生首次参加课程时必须进行代数I课程评估,除非那些有合格例外的人,例如在中学的代数I终止课程评估的学生。 如果尚未参加联邦高中评估要求,则可能需要10、11或12年级的学生参加考试。 对于科学,所有5年级,8年级和11年级的学生均应参加科学评估。 对于高中生,年级水平是由信用总数而不是班主任分配确定的。中学生六年级至八年级的学生有望根据当前的年级级别参加NJSLA,除非他们参加任何高中数学课程(即代数I,几何或代数II)。注意:入学为期一年的代数I课程的6年级学生必须接受代数I评估和6级NJSLA数学评估。所有高中生首次参加课程时必须进行代数I课程评估,除非那些有合格例外的人,例如在中学的代数I终止课程评估的学生。如果尚未参加联邦高中评估要求,则可能需要10、11或12年级的学生参加考试。对于科学,所有5年级,8年级和11年级的学生均应参加科学评估。对于高中生,年级水平是由信用总数而不是班主任分配确定的。有关参与NJSLA的更多信息,我们强烈鼓励Leas下载和查看州评估注册提交提交常见问题解答,该常见问题可以位于NJ Smart Resources和培训>文档>下载>州评估注册提交中。NJSLA/NJGPA 2024春季测试协调器手册将在必须测试的第1.3节中包含有关NJSLA测试要求的其他信息。手册的这一部分中的一些主题包括但不限于:
季度新闻通讯
新开设的课程: 课程名称:算子理论和算子代数 课程:博士(数学) 讲师:Harsh Trivedi 博士和 Ratan Giri 博士 学习目标:这是一门入门课程。它可应用于数学研究的几个领域,包括微分方程、量子统计力学、量子信息论和数学物理。它主要面向希望在算子理论、算子代数和相关领域进行研究的学生。 课程名称:李代数 课程:博士(数学) 讲师:Ashish Mishra 博士 学习目标:本课程介绍李代数理论。我们的目标是研究有限维复半单李代数的结构及其表示理论。李代数是一个重要的研究领域,在数学的各个领域有着广泛的应用,例如微分几何、组合学、数论、微分方程,以及物理学的许多领域,如量子力学和粒子物理学。为了给学生提供学习李代数高级主题的背景知识,本课程将从模块理论的介绍开始,特别介绍模块的张量积和张量代数的主题。本课程主要面向希望在李代数和相关领域进行研究的学生。

15.1.1。轻孔量规
等式中的附加术语。(15.106)称为↑Witt代数等式的中央扩展。(15.93),因为它通过与所有其他元素通勤的形式const 1的新元素扩展了旧代数(l?m);此类元素(组或代数)称为↑数学中的中央。如果人们指出了一个集中扩展的谎言代数,则新的中央元素会导致相应谎言组的乘法规则中的其他相位因子,即所谓的↑cocycles。这些修改后的乘法规则定义了原始谎言组的投影表示(这些本质上是组表示“到相位因素”)。现在记住,量子力学与希尔伯特空间中的状态向量有关,直到全球阶段。从数学上讲,量子理论的物理状态空间是↑投影希尔伯特空间。然后,上述投影表示形式实现了此类空间上的物理对称性。这一参数表明,量子力学中对称代数的中央扩展的外观直接与全球阶段是非物理的事实有关。

伊娃·里科马尼奥 - 热那亚
精选出版物 - E Pesce、F Porro、ER《大型数据集、偏差和面向模型的最优实验设计》《国际质量与可靠性工程》(正在印刷)。 - F Carli,M Leonelli,ER,G Varando 用于分层分阶段树结构学习的 R 包 stagedtrees J. of Stat Software,102:6,1–30,2022。 - M Leonelli,ER,JQ Smith 用于群体决策的概率输出的连贯组合:一种代数方法,OR Spectrum 42:2,499–528,2020 - Fassino,ER,MP Rogantin 一些复杂函数的体积规则和期望值,代数统计杂志,SE Fienberg 纪念刊,10:1,115–127,2019 - E Pesce,ER,HP Wynn 大数据中的实验设计问题。偏见问题,在:Greselin F、Deldossi L、Bagnato L、Vichi M(编辑)复杂数据的统计学习。 CLADAG 2017。分类、数据分析和知识组织研究。 Springer, Cham, 第 193–20 页,2019 年 - S Barani, ER 等 7 人《地震矩释放的时间尺度及其对地震发生概率的影响》,《科学报告》8:1,1–11,2018 年 - A Bigatti, CGIorgen, ER、JQ Smith 使用计算机代数发现统计等价类,《国际近似推理杂志》95,167–184,2018 年 - M Leonelli, ER、JQ Smith 用于计算乘法影响图中预期效用的符号代数,《数学与人工智能年鉴》81:34,273–313,2017 年 - S Massa, ER 高斯马尔可夫组合的代数表示,《伯努利》23:1, 626–644,2017 - ER,N Rudak,S Kuhnt 统计模型构建设计的数值代数扇形,Statistica Sinica,26,1021–1035,2016 - C Fassino,ER,G Pistone 一般节点的插值立方体公式的代数,Statistics and Computing,24:4,615–632,2014 - ER,JQ Smith,P Thwaites 使用链式事件图进行因果分析,人工智能 174:12-13,889–909,2010 - ER 代数统计简史(第 8 届德国概率和统计公开会议开幕报告)。 Metrika 69, 397–418, 2009 - MJ Chappell, G Margaria, ER, HP Wynn 微分代数方法用于研究生物有理多项式模型的结构可识别性。数学生物科学,174,1–26,2001 - G Pistone, ER, HP Wynn 代数统计学。Chapman and Hall/CRC,博卡拉顿,2000
入学考试问题。生物信息学和系统生物学
○数学。汗学院○数学超级课程:坐标几何和矢量代数。Trishna知识系统○数学超级课程:代数I和II。Trishna知识系统○代数介绍:解决问题的艺术。rusczyk R○线性代数:逐步。singh k○初学者的纯数学:严格的逻辑介绍,集合理论,抽象代数,数字理论,真实分析。Warner S○Python教程○学习Python 2○“ Python Generation”:初学者的课程(在RUS中)○Python(in Rus)○初学者Python Books

量子态、群和单调度量张量
其中 ρ 是量子态,U ∈ U ( H ) ,φ U 表示每个单调度量张量 G 的等距同构,这是因为在完全正的、保迹映射下必须具有单调性,这代表了经典粗粒化量子版本 [ 35 , 40 ]。从无穷大的角度来看,作用量φ可以用 S + 上的基本矢量场来描述,从而提供了酉群李代数 u ( H ) 的反表示。这些矢量场用 X b 表示,其中 b 是 H 上的埃尔米特算子(有关更多信息,请参见第 2 节),对于所有单调度量张量来说,它们都是 Killing 矢量场,因为 U ( H ) 通过等距同构起作用。现在,李代数 u ( H ) 是 H 上有界线性算子空间 B ( H ) 的李子代数,具有由线性算子之间的交换子 [· , ·] 给出的李积。特别地,可以证明 B ( H )(具有 [· , ·] )同构于 U ( H ) 复数化的李代数,即 H 上由可逆线性算子组成的李群 GL ( H ) 的李代数。此外,已知 [ 9 , 15 , 26 , 27 ] GL ( H ) 作用于流形 S + ,更一般地作用于整个量子态空间 S ,根据

A.I. Shirshov 的未发表结果
给出了一个不能嵌入结合代数的交换代数上的李代数的例子。这项工作很快在国外引起了反响。1958年,Pierre Cartier (巴黎)的工作出现了,并被引用,这是A.I.工作的进一步延续。Shirshov(附另一个例子)。1963年,Paul Cohn (伦敦)提出了更多这样的李代数的例子。Shirshov和Cartier的例子是在域GF (2)上的交换代数,Cohn的例子是在所有域GF (p)上的。到目前为止,还没有特征为零的交换代数上的例子。

量子态、群和单调度量张量
其中 ρ 是量子态,U ∈ U ( H ) ,φ U 表示每个单调度量张量 G 的等距同构,因为在代表经典粗粒化量子版本的完全正、保迹映射下,单调性是必须的 [ 35 , 40 ]。从无穷小角度来看,作用量 φ 可以用 S + 上的基本矢量场来描述,从而提供酉群李代数 u ( H ) 的反表示。这些矢量场用 X b 表示,其中 b 是 H 上的埃尔米特算子(第 2 节将对此进行详细介绍),对于所有单调度量张量来说,它们都是 Killing 矢量场,因为 U ( H ) 通过等距同构起作用。现在,李代数 u(H) 是 H 上有界线性算子空间 B(H) 的李子代数,具有由线性算子之间的交换子 [·,·] 给出的李积。特别地,可以证明 B(H)(具有 [·,·])同构于 U(H) 复数化的李代数,即 H 上由可逆线性算子组成的李群 GL(H) 的李代数。此外,已知 [9,15,26,27] GL(H) 作用于流形 S + ,更一般地作用于整个量子态空间 S ,根据