XiaoMi-AI文件搜索系统
World File Search System仪表飞行
附加仪表飞行机动
仪表起飞(ITO)....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................1 图案 A.................... ... . . . . . . . . . . . . 4 图案 B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........................................................................................................................................................................................................................................ 8 基本仪表飞行模式............................................................................................................................................................................................................................................................................................................................. ........................................................................................................................................................................................ ........................................................................................................................................................................................ 11 VOR 时间/距离检查....................................................................................................................................................................................................................................................................................... ........................................................................................................................................................................ . ...
陆军飞行员仪表飞行
第二节 — 导航系统 ................................................................................................ 7-3 无方向性无线电信标 .............................................................................................. 7-3 频率 ................................................................................................................ 7-3 自动测向仪 ............................................................................................................ 7-3 罗盘定位器 ............................................................................................................ 7-4 语音传输 ................................................................................................................ 7-4 识别 ...................................................................................................................... 7-4 精度 ...................................................................................................................... 7-4 干扰 ...................................................................................................................... 7-5 甚高频全向范围 ................................................................................................ 7-5 战术空中导航操作理论 ........................................................................................ 7-8 甚高频全向范围/战术空中导航 ........................................................................................ 7-9 测距设备 ................................................................................................................ 7-9 全球定位系统 ........................................................................................................ 7-10 信号精度 ................................................................................................................ 7-10 段 ........................................................................................................................ 7-11 导航数据库 ................................................................................................ 7-11 美国国家空域系统之外 .............................................................................. 7-11 接收机自主完整性监测 ................................................................................ 7-11 数据库要求 ................................................................................................ 7-11 手动数据库操作 ............................................................................................. 7-12 嵌入式全球定位系统/惯性导航系统 ............................................................. 7-12 航向灵敏度 ............................................................................................................. 7-12 广域增强系统 ............................................................................................. 7-12 局域增强系统 ............................................................................................. 7-13 惯性导航系统 ............................................................................................. 7-13
UAM 仪表飞行程序设计和评估...
美国宇航局先进空中机动 (AAM) 国家运动 (NC) 与 Joby Aviation 合作,使用 Joby 的高保真工程飞机模拟器测试和评估不同的城市空中机动 (UAM) 仪表飞行程序 (IFP) 候选设计,包括新的起飞、航路、进近和复飞架构。结合模拟器测试,这项工作还评估了相关方面,例如制图、编码和遵守飞行计划标准。测试目标是评估不同发展中的 IFP 变体的安全性、效率、乘客舒适度和噪音。安全相关措施包括与地形和垂直障碍物的间隙、程序可飞性和飞行路径一致性。效率相关措施包括所需时间、所需空域容量和所需电池能量。乘客舒适度和乘坐质量措施包括滚动/俯仰角度、滚动/俯仰姿态变化率和激进操作前的空速、主观飞行员/乘客反应和加速力。不同 IFP 的噪声影响将使用来自模拟器的数据进行内插/外推,这些数据输入到单独的 Joby 声学软件工具中。总体而言,在不同的发育 IFP 配置文件变体之间确定并描述了几种权衡。没有一个版本的发育 IFP 结构在上述所有测量中得分最高;相反,不同的
姿态仪表飞行 - 地面学校
注视,即盯着单一仪器,通常是有原因的,但效果不佳。例如,飞行员可能会盯着低于指定高度 200 英尺的高度计读数,并想知道指针是如何到达那里的。在注视仪器时,可能会无意识地对控制装置施加越来越大的张力,这会导致未被注意到的航向变化,从而导致更多错误。另一种常见的注视可能是在开始改变姿态时。例如,为 90° 转弯建立了一个浅坡度,飞行员没有保持对其他相关仪器的交叉检查,而是在整个转弯过程中盯着航向指示器。由于飞机正在转弯,因此在转弯后约 25 秒内无需重新检查航向指示器。这里的问题可能并不完全是由于交叉检查错误造成的。这可能与仪器解释困难有关。读取航向指示器的不确定性(解释)或由于转弯时滚动不一致而导致的不确定性(控制)可能会导致注视。
城市空中交通仪表飞行程序设计与评估
美国宇航局先进空中机动 (AAM) 国家运动 (NC) 与 Joby Aviation 合作,使用 Joby 的高保真工程飞机模拟器测试和评估不同的发展候选城市空中机动 (UAM) 仪表飞行程序 (IFP) 设计,包括新的出发、航路、进近和复飞架构。结合模拟器测试,这项工作还评估了相关方面,例如制图、编码和遵守飞行计划标准。测试目标是评估不同发展 IFP 变体的安全性、效率、乘客舒适度和噪音。安全相关措施包括与地形和垂直障碍物的间隙、程序可飞性和飞行路径一致性。效率相关措施包括所需时间、所需空域容量和所需电池能量。乘客舒适度和乘坐质量措施包括滚动/俯仰角度、滚动/俯仰姿态变化率和激进操作前的空速、主观飞行员/乘客反应和加速力。不同 IFP 的噪声影响将使用来自模拟器的数据进行内插/外推,这些数据将输入到单独的 Joby 声学软件工具中。总体而言,我们在开发 IFP 配置文件的不同变体之间确定并描述了几种权衡。没有一个版本的开发 IFP 结构在上述所有指标中得分最高;相反,不同的 IFP 变体被证明对不同的指标来说是最佳的,这证实了最佳 IFP 取决于针对特定飞机、位置和操作优先考虑哪些具体指标。
o 海岸警卫队飞机模拟器 - DTIC
在本研究中开发的培训要求技能已被确定,这些技能可以在设计复杂程度从最简单到最复杂的训练设备中合理地开发。有些程序技能可以在非常简单的训练设备中开发,例如在纸质训练器中学习 HH3F 发动机启动程序;有些多维技能可以在稍微复杂一些的设备中开发,例如在仪表飞行训练器中学习仪表导航;有些技能涉及对飞行安全至关重要的程序和心理运动要素的时间共享,这些技能只能在高度复杂的任务模拟器中开发,例如在飞行模拟器中学习在恶劣天气下仪表飞行期间对各种系统故障的及时响应。
AC-ATO 002 飞行模拟训练设备.pdf
4.0 资格和批准指南 (QAG)。 4.1 QAG 详细描述了基本仪表飞行训练器或飞行程序训练器的模拟飞机系统、设计标准和功能。基本仪表飞行训练器所需的设计标准在附录 A 中描述,飞行程序训练器的其他设计标准在附录 B 中描述。QAG 必须包括并验证这些附录中确定的所有必需的设计和功能元素,以方便当局验收。注意:QAG 是由制造商制定并由颁发授权/批准书和/或资格证书的国家批准的文件。 4.2 QAG 文件必须包括封面,其中包含公司名称、地址和联系电话,以及训练设备图片、型号名称和编号。下一页应包括目录。以下是适当 QAG 内容的示例: 1. 训练器描述。包括所代表飞机的详细描述以及
黎巴嫩航空法规
第四部分 人员执照 第 0 部分 - 一般规定 400.01 解释 1.在本部分中,“特技飞行” - 指飞机姿态变化导致倾斜角大于 60 度、异常姿态或非正常飞行所导致的异常加速度的机动;“飞机” - 不包括超轻型飞机;“气球” - 包括任何轻于空气的飞机;“考试” - 指人员执照标准要求颁发执照或加签带有等级的执照的任何书面考试或书面实践资格考试;“外国执照验证证书” - 指管理局根据第 401.08 款颁发的证书;“滑翔机” - 包括动力滑翔机; “地面学校教学” - 指通常向一人或多人提供的课堂教学或基于计算机的教学,涵盖按照经批准的培训计划组织的讲座、家庭作业和自定进度学习计划;“监考员” - 指由管理局指定监督书面考试的人员;“主基地” - 指飞行训练机构拥有人员、飞机和设施以运营飞行训练服务的地点,并作为飞行训练机构的主要营业地点;“仪表地面时间” - 指飞行员在经管理局批准的合成飞行教练机上进行地面模拟仪表飞行练习的时间。“仪表飞行时间” - 指飞行员仅参考仪表而不参考外部参考点驾驶飞机的时间。“仪表时间” - 指仪表飞行时间或仪表地面时间。
实现最佳 NextGen 优势的最低能力列表
PBN 以性能标准的形式描述了飞机的导航能力。这些标准,例如区域导航 (RNAV) 或所需导航性能 (RNP) 导航规范 (NavSpecs),可在地面或空间导航辅助设施覆盖范围内,或在飞机自带导航能力范围内,在任何所需飞行路径上实现横向和/或垂直导航。一般而言,RNAV 和 RNP 导航规范相同,但 RNP 增加了机载性能监控和警报功能。NavSpec 通常用横向精度值来描述(例如,RNP 1 为 1NM),并指定与仪表飞行操作或仪表飞行特定航段相关的预期 95% 横向导航 (LNAV) 性能。
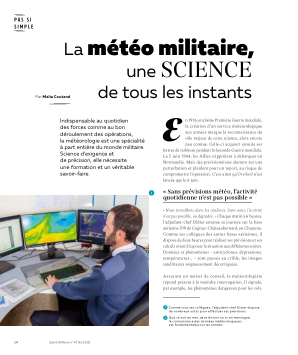
军事气象,一门永恒的科学
目标:避免飞行员的危险区域、结冰、湍流和阵风。 “天气总是一样的,云还是云。但我们会根据任务、飞机类型和飞行员来制定建议。后者并不总是具有相同的期望或相同的资格。因此,我们为无人机操作团队提供的天气与“阵风”战斗机操作团队提供的天气不同,”这位拥有 18 年从业经验、深谙所有诀窍的一级准尉说道。 “作为战斗机飞行员,天气对于我们的日常生活非常重要。印度空军和太空部队的训练机之一皮拉图斯 PC-21 的飞行员兼教练杰森少尉证实:“它能调节我们的准备工作,帮助我们了解选择哪种飞行模式——目视飞行还是仪表飞行,以及某些练习是否可行。”