XiaoMi-AI文件搜索系统
World File Search System伺服

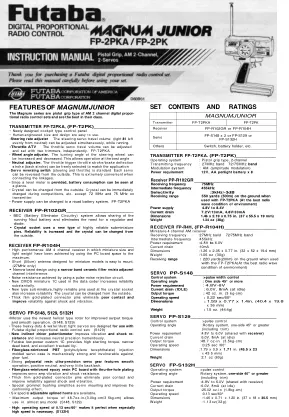
4 通道 F.M. 系统飞机操作...
6.安装 • 按照图 2 连接伺服器、电池和开关线束。仔细检查以确保所有连接器都已正确就位。• 将电源开关打开并操作发射器。观察控制面的移动方向,看它们是否与控制杆运动相对应。使用伺服反向开关(图 3)纠正不正确的伺服方向。• 在整个范围内操作每个伺服器并检查推杆是否卡住。根据需要进行纠正。将每个控制杆保持在极限位置并听伺服嗡嗡声。嗡嗡声表示控制连杆对于伺服行程量来说太紧。可以通过端点调整或加长推杆来纠正。• 对伺服输出臂施加不合理的力会对伺服产生不利影响,并迅速耗尽飞行电池。因此,所有控制连杆应尽可能平稳无摩擦地运行。使用 Hitec“Jam Check'r”确保控制设置平稳、安全。• 安装开关时,切割一个比开关全行程稍大的矩形,然后安装开关,使其从 ON 平稳移动到 OFF。• 接收天线的长度对于接收传输的信号至关重要,因此请勿切割或捆扎天线,尽量保持天线完全伸展。让接收天线远离电源线和伺服线。远离金属框架。• 用海绵橡胶包裹接收器,防止其过度振动(注意:使用 Hitec“飞行保护器:#58480”)。接下来将接收器放入塑料袋中。用橡皮筋固定塑料袋,以防潮防尘。• 完全折叠发射器天线,并在 60 至 90 英尺的距离内操作系统。系统应能完美运行。如果不是,请检查接收器和发射器电池是否处于最大容量。
magnum junior 的功能 - 您已到达 ftp.hobbico.com
发射器 FP-T2PKA,(FP-T2PK)_____________ • 新设计的驾驶舱式控制面板 • 人性化的尺寸和设计易于使用。 • 转向速率调节器 可在行驶过程中同时调节转向伺服行程量 (从中立均匀地向右 81 向左)。 • 油门 ATV 油门伺服行程量可以用两个微调器独立调整和设置。FP-T2PKA • 车轮角度调节器。可增加和减少方向盘的转动角度。这样可以以最佳角度操作 • 中立调节器。可自由选择油门扳机油门行程/制动器偏转行程 (后行程) 以匹配应用 • 伺服反转开关 (转向和油门) 是标准配置 每个伺服都可以从外部反转。这在连接连杆时极为方便。 • 由于提供了水平仪,因此可以一目了然地看到电池消耗。 • 可以从外部更换晶体。比赛等期间可立即更换晶体,发射器上的 72 MHz 和 75 MHz 除外。 • 电源可更改为镍镉电池系统。 FP-T2PKA

三重电传操纵备用控制系统
三个备用控制系统通道的每个轴上的积分器提供电子配平、均衡和同步。当主通道接通时,备用控制系统伺服命令与这些积分器的主伺服命令同步。这些输入到备用控制系统表决器中,即使控制传感器输出和系统间控制规则存在差异,它们仍会跟踪主通道伺服命令。在从主控制系统切换到备用控制系统期间,必须将备用控制系统与主控制系统持续同步,以尽量减少控制面瞬变。如果主系统发生故障或飞行员命令脱离,就会发生切换。同步网络的带宽约为 2.5 赫兹
ProTuner 1.0.1.810
1. 简介................................................................................................................ 1 2. 软件安装.............................................................................................................. 1 3. 连接和测试.............................................................................................................. 5 RS232 接口连接................................................................................................ 5 测试伺服................................................................................................................ 5 4. 软件简介............................................................................................................. 7 ProTuner 主窗口................................................................................................. 7 Com 配置窗口.................................................................................................... 8 5. 伺服调谐............................................................................................................. 16 简介............................................................................................................. 16 位置环简介.................................................................................................... 18 围绕速度的位置..................................................................................... 18 围绕扭矩的位置.....................................................................................

实验无人机减速板的识别与建模
摘要 本文介绍了 FLEXOP H2020 EU 项目框架内无人驾驶实验飞机减速板的建模、系统识别、仿真和飞行测试。由于飞机配备了响应缓慢的喷气发动机,因此在加速飞机进行颤振测试后,需要使用减速板来增加减速,以便保持在当局批准的有限空域内进行飞行测试。减速板由伺服电机、开启机构和减速板控制面本身组成。在简要介绍了演示飞机、减速板设计和实验测试台后,本文参考了以前的工作,对建模和系统识别进行了深入描述。系统识别包括确定高度非线性(饱和和负载相关)伺服执行器动力学以及非线性气动和机械特性,包括刚度和惯性效应。相对于之前的工作,新的贡献是考虑了负载打开或关闭的统一伺服角速度极限模型,考虑了整个偏转和飞机空速范围的减速板法向力和阻力模型的详细构建和评估,提出了统一的气动-机械非线性模型,给出了减速板角度、动态压力和伺服扭矩之间的直接关系,以及基于传递函数的机构刚度和惯性效应建模。确定的伺服动力学模型包括系统延迟、内部饱和、前面提到的负载相关角速度极限模型和传递函数模型。基于考虑减速板整个开启角度和动态负载范围的试验台测量验证了伺服模型。还考虑了新的、未发表的测量结果,其中伺服负载随着伺服移动而逐渐增加,以在更现实的情况下验证模型。然后构建完整的减速板模型并在模拟中测试以检查实际行为。下一步,通过在软件在环 (SIL) Matlab 仿真中使用飞机的基线控制器飞行模拟测试轨迹,对集成到 FLEXOP 飞机非线性仿真模型中的减速板模型进行测试。首先,将独立的减速板仿真与 SIL 结果进行比较,以验证减速板模型与非线性飞机仿真的完美集成。最后,使用实际飞行数据来验证和更新减速板模型并显示减速板的有效性。然后比较有和没有空气制动器的减速时间,强调空气制动器在测试任务中的实用性。

EPP3 系列电动气动压力调节器
EPP3 系列是一系列带有闭环集成电子控制的电动遥控气动压力调节器。它可以根据电控制信号按比例调节出口压力。EPP3 调节器包括一个传统的伺服操作气动压力调节器,其中先导室由两个脉冲宽度调制的 2 通电磁阀中的一个或另一个供给。压力传感器测量调节器的出口压力并向放大器提供反馈信号。控制信号和反馈信号之间的任何差异都会转换为数字信号,以激励一个或另一个 2 通阀的线圈,以校正调节器的位置。控制信号可以是电压 (0 - 10V) 或电流 (4 - 20 mA)。“填充阀”的入口直接连接到调节器的主入口 P;通电后,该阀将填充伺服腔,以增加调节器出口 A 处的压力。当另一个“排气阀”通电时(调节器出口 A 处的压力降低),伺服腔的压力将通过位于盖子和主体之间的排放孔排出,并直接排入大气,无需消音器。主要调节压力的排放将通过快速排气 R 进行。建议使用传统消音器。两个电磁阀都确保伺服腔的填充或排空,以增加或减少调节器出口的压力。在阀门的静止位置,所有端口都被阻塞。

扭转疲劳系统用于机械表征...
-- ................................. 附录 B:6250 伺服控制器规格 125 . 附录 C:APEX 电机规格 .............................................................. 126
用于机械表征的扭转疲劳系统...
-- ................................附录 B:6250 伺服控制器规格 125 .附录 C:APEX 电机规格 ......................................................... 126

塑料 - Baumüller
直流链路系统中与单单元相结合的模块系统非常有用,例如,用于与高性能驱动轴相结合的几个轴的电气化。起点通常是已经实施的伺服液压驱动器,由额外的电轴补充。在这种情况下,大型、强大的单单元通过智能连接技术直接链接到模块系统。这节省了控制柜中的空间并且易于实施,因为两种单元类型使用相同的固件。因此,由于所需的工程工作有限并且无需单独的电源,因此可以以经济的方式提高伺服液压机的电气化程度。