XiaoMi-AI文件搜索系统
World File Search System低压

Magnum IEC 低压空气断路器
安全第一 充分考虑了操作员安全和系统安全。• 改进的 C 环电流路径设计显著提高了安全性和效率。• 更高的电流额定值增加了接触表面的吹力,允许适当的下游保护装置打开,隔离故障并增加正常运行时间。• 断路器面板上显示正接通。这种独特的联锁功能可防止在触点焊接时打开杠杆门,保护人员免受带电主触点的暴露。进行电流释放可防止断路器在峰值电流超过 RMS 标称电流 25 倍的情况下关闭故障。• 键控传感器插头确保传感器在现场无错误安装。• 当断路器通电时,无死前面板将操作员与初级电压隔离开来。• 如果保持闭合信号(机械或电气),防泵可防止任何在短路故障时重新闭合断路器的尝试。

750 – 1600 cfm | 低压空气压缩机
• 全彩色数字显示屏 • LED 背光仪表板 • 带预装手册的车载电子阅读器 • WiFi 连接,可在移动设备上查看远程控制面板 • 1 年/2,000 小时包装保修 • 2 年/4,000 小时保修主机标准 • 易于维护冷却器、过滤器和液体 • 微处理器控制的发动机,具有最佳压缩机性能和诊断功能 • 易于维护冷却器、过滤器和液体 • 500 小时发动机油/1,000 小时主机油服务 • 高排气温度、低发动机油压、高发动机冷却液温度和低燃油位时的自动安全关闭 • 镀锌金属板外壳,提供终极防腐保护 • 易于维护冷却器、过滤器和液体 • 建筑级底座千斤顶支架 • 带挂锁的撞击闩锁手柄 • Wifi 监控系统
低压系统绝缘协调提案
电子设备因瞬变而发生故障和电路故障是目前的问题,而且随着小型化和电路复杂化的趋势不断推进,这个问题在未来可能会变得更加严重。目前,似乎还没有明确的办法来实现设备瞬变耐受能力与这些设备所承受的瞬变之间的兼容性。这种情况如图 1 所示。多年前,电力行业也出现过类似的情况。雷电产生的瞬变经常导致变压器和发电机等重要且昂贵的电力设备发生故障。这些瞬变问题通过以绝缘协调概念为指导的工程设计和一系列基本绝缘水平 (BIL) 的建立得到了解决。
低压暴露对飞行员和高...的影响
低压暴露对飞行员和 1 高海拔特种作战人员的影响 1.0 简介 1 1.1 成功与挑战 1 1.1.1 资金与成员 1 1.1.2 COVID-19 与生活环境 1 1.1.3 成功案例 2 1.1.4 结果 2 2.0 高海拔相关脑损伤 2 2.1 美国研究 2 2.1.1 人体研究 2 2.1.2 动物研究 4 2.1.3 正在进行的研究 6 2.1.4 当前研究 12 2.2 英国研究 13 2.2.1 已发表的研究 13 2.2.2 正在进行的研究 13 2.2.3 当前研究 14 2.3 德国研究 14 2.3.1 已发表的研究 14 2.3.2 已完成的研究待发表 14 2.4加拿大研究 15 2.4.1 已完成待发表的研究 15 2.4.2 加拿大 WMH 因果理论 16 2.4.3 摘要和演示文稿 18 3.0 前进的道路 19 3.1 理解病理生理学的差距正在缩小 19 3.2 未来之路 20 4.0 北约团队参考文献 20 5.0 其他参考文献 22
低压网络容量研究第一阶段报告
本报告探讨了一系列有可能在不更换资产的情况下扩展低压网络容量的技术。首先,我们根据几种关键的低碳技术检查需求概况,以确定预计的网络变化的时间范围和幅度。在 2050 年向净零排放过渡的过程中,低压网络的峰值需求预计将迅速增加,部分原因是热力和运输电气化,而分布式发电也可能给系统带来压力。这些影响将被智能家电和消费者行为的转变所抵消,然而,网络加固和升级可能仍是必要的。至关重要的是,加固支出是通过客户电费收回的,因此找到推迟或避免加固的方法对于确保客户成本尽可能低至关重要。

低压精度计时,多任务有效载荷
CACI在低尺寸,重量和功率(交换)精度的双向时间传输(TWTT)和振荡器建模方面的进步提供了小平台同步的飞跃。以前需要昂贵频率参考或接受相干性能的妥协的应用程序现在可以通过该技术结合实验室级的时机和长期频率稳定性。我们在多个传输物理层上支持了我们专有处理和时钟专业知识的组合,包括使用软件定义的无线电(SDR)的截距/检测(LPI/D)射频(RF)波形的低概率。该解决方案对振荡器技术不可知,可以缩放以支持多时钟合奏。
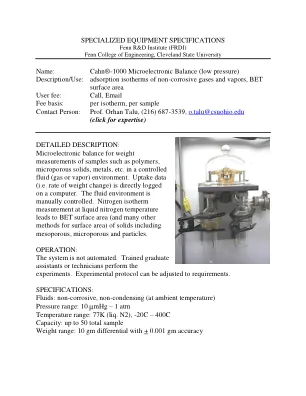
Cahn®-1000 微电子天平(低压...
表面积 用户费用:电话、电子邮件 费用基础:按等温线、按样品 联系人:Orhan Talu 教授,(216) 687-3539,o.talu@csuohio.edu(点击获取专业知识) 详细描述:微电子天平,用于在受控流体(气体或蒸汽)环境中测量样品(例如聚合物、微孔固体、金属等)的重量。吸收数据(即重量变化率)直接记录在计算机上。流体环境是手动控制的。在液氮温度下进行氮等温线测量可获得固体(包括介孔、微孔和颗粒)的 BET 表面积(以及许多其他表面积方法)。 操作:该系统不是自动化的。训练有素的研究生助理或技术人员进行实验。实验方案可以根据要求进行调整。 规格:流体:无腐蚀性、无冷凝性(在环境温度下)压力范围:10

联合能源低压电池试验
UE 与零售参与者接洽,以确定他们对合作该项目的兴趣程度。讨论的重点是零售商是否愿意自费建造支持基础设施,以整合到即将建造的 BESS 单元和车队控制系统中。零售商需要确定是否有足够的规模,不仅可以收回成本,还可以通过套利或 FCAS 市场产生收入。一旦我们获得成功的隔离豁免申请,UE 就会与 Simply Energy 签订零售租赁协议,以获得电池储能车队的市场交易权。当 UE 不需要 BESS 用于网络用例时,Simply Energy 将运营它们以提供批发电力和频率控制辅助服务 (FCAS)。这是一个示例,说明网络和零售商如何共享价值流,以便从同一资产中为客户和更广泛的能源系统带来利益。

低压非低温储氢
固定式氢燃料电池正成为一种提供清洁灵活电力的解决方案。可再生能源电解可以为燃料电池产生氢气,但使用时可能需要储存数天的氢气,以平滑可再生能源的变化。在使用氢气作为备用电源系统的情况下,也需要储存,必要的目标储存时间为 96 小时,以满足美国国家消防协会规定的要求。这是一个挑战,因为压缩气体或低温氢气储存在操作上成本高昂,而且对于这些储存时间,大规模储存效率低下,而用于储存的盐穴并不广泛,需要管道才能使其适用于更大规模的应用。因此,已经进行了大量工作,以确定在较低压力和非低温下运行的大规模氢气储存的材料解决方案。此外,在大多数低温氢气储存条件下,氢气会以“沸腾”的形式从储罐中自然流失。这些沸腾事件代价高昂,因此迫切需要能够有效捕获沸腾氢气的材料。

低压高性能 CMOS 电流模式四...
参考年份 电源 (V) 功耗 (µW) –3 dB 带宽 (MHz) 非线性 (%) THD (%) 技术 (μm) [1] 2013 1.2 75 59.7 0.9 N/A 0.18 [8] 2020 1.8 61.9 736 0.93 0.98 (20 µA, 1 MHz) 0.18 [11] 2009 3.3 340 41.8 1.1 0.97 (20 µA, 1 MHz) 0.35 [15] 2009 3.3 240 44.9 1.15 0.76 (20 µA, 1 MHz) 0.35 [23] 2016 2.8 0.521 137 1.12 1.45 (20 µA, 1 MHz) 0.35 [24] 2019 0.8 92 623 0.69 0.97(20 µA,1 MHz) 0.18 [25] 2017 1 0.508 33.52 2.9 2.05(0.1 µA,100 kHz) 0.18 [26] 2018 0.8 770 34.1 2 0.67(50 nA,0.1 MHz) 0.18 [27] 2021 ± 1 700 260 N/A 0.49(±150 µA,1 MHz) 0.5 [28] 2014 1.5 700 230 1.8 N/A 0.18 [29] 2012 ± 0.75 2.3 2.8 0.3 0.7 (20 nA, 1 kHz) 0.35 [30] 2017 1.8 144 62 1.5 1 (10 µA, 10 kHz) 0.18 [31] 2005 2 5.5 0.2 5 0.9 (150 nA, 0.2 MHz) 0.35 [32] 2000 5 N/AN/AN/A 2(50 µA, 10 kHz) 2.4 [33] 2001 3.3 600 3 N/A 1.5 (20 µA, 10 kHz) 2.4 [34] 2014 1 90 N/AN/AN/A 0.18 本研究 ----- 0.75 105 850 0.85 0.42(20微安,1兆赫) 0.18