XiaoMi-AI文件搜索系统
World File Search System体检
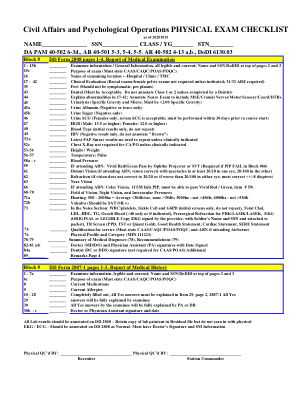
民事和心理行动体检清单
身高/体重 体温;脉搏 血压 如果参加 ABN:鲜艳红/绿,通过眼科投影仪或 SVT 进行测试(如果 PIP 在区块 #66 中失败,则需要通过)远视力(如果参加 ABN,视力可通过眼镜矫正至至少一只眼睛 20/20,另一只眼睛 20/100)屈光度(如果视力无法矫正至 20/20 或任何一只眼睛的视力低于 20/100,则必须矫正 <+/-8 屈光度)如果参加 ABN,则近视力:色觉。如果 SM 未通过 PIP,则必须能够通过鲜艳红/绿,项目 #59)视野、夜视和眼压听力:500 - 2000hz = 平均 <30db/耳朵,无 >35db;3000hz - 不 >45db; 4000hz - 不大于 55db 瓦尔萨尔瓦(应为 SAT 或 +)在备注部分:白细胞 / 血小板、镰状细胞和 G6PD(仅限初始筛查,请勿重复)、总胆固醇、LDL、HDL、TG、潜血(仅限 >40 或如有指示)、PRK/LASIK/LASEK 术前屈光度、心电图(由提供者签名的原件或清晰可读的心电图副本,附有士兵姓名和社会保险号并附在包裹上)、结核病筛查(PPD、TST 或 Quant Gold)、健康声明、心脏声明、SERE 声明服务资格(必须说明 CAAS/CAQC/POAS/POQC,如果参加空降,则必须说明 ABN)身体概况和类别(MIN 111121)

在病例对照研究中使用病原体检测数据来估计疫苗的直接效果
保留所有权利。未经许可不得重复使用。(未经同行评审认证)是作者/资助者,他已授予 medRxiv 永久展示预印本的许可。此预印本的版权所有者此版本于 2020 年 1 月 21 日发布。;https://doi.org/10.1101/2020.01.15.20017749 doi:medRxiv preprint

气体检测:一种风险缓解技术 - Det-Tronics
一些标准规定了每个生命安全设备应测试的性能水平。性能测试和认证可验证设备在最坏的标准条件下是否能按照制造商的规定运行。一些气体检测仪制造商会自行认证产品性能,这意味着他们仅依靠自己的内部测试和评估来证明其产品符合适用标准。其他制造商则会在自己的测试和评估中添加第三方测试组织的报告,而该报告可能无法通过适当的实验室认证方式获得。虽然安全设备制造商了解他们的设备,并且在其领域知识渊博,但经过适当认证的第三方测试和认证可以提供对设计和产品性能的独立和公正的评估。
体检标准 | 陆军条例 40–501
提议者和例外权力。本法规的提议者是卫生局局长。提议者有权批准符合控制法律和法规的本法规例外或豁免。提议者可以书面形式将此批准权委托给提议机构或其直接报告单位或现场作业机构内的上校或同等级别的部门负责人。活动可以通过提供理由来请求豁免本法规,理由包括对预期收益的全面分析,并且必须包括活动高级法律官员的正式审查。所有豁免请求都将由请求活动的指挥官或高级领导人批准,并通过其上级总部转发给

Dräger Polytron® 7000 固定式气体检测仪 - Keison 产品
使用三种不同的软件加密狗,可将不同的功能内置到变送器中,以根据具体用途进行调整。使用传感器测试加密狗,Dräger Polytron 7000 可执行多种不同的专利传感器测试,确保传感器和气体检测系统的可靠性和功能性。使用新的传感器诊断功能(包括传感器测试),可估计操作需求和剩余传感器寿命,以便制定维护和更换计划。数据加密狗中集成了数据和事件保存选项。这样可保存测量值和事件,例如警报和警告。可通过红外接口将数据下载到 PDA m515-Ex,并使用 Dräger GasVision 软件包在 PC 上进行评估。只需按一下按钮,变送器显示屏上就会显示 15 分钟的浓度历史记录。
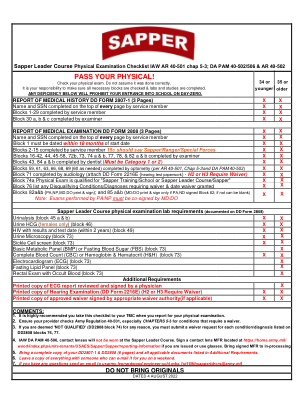
通过体检!
体检报告 DD 表格 2808(3 页) X X 服务成员在每页顶部填写姓名和社会保险号 X X 第 1 块的日期必须在开始日期的 18 个月内 X X 服务成员填写的第 2-15 块,15c 应该写明工兵/游骑兵/特种部队 X X 第 16-42、44、45-58、72b、73、74 a 和 b、77、78 和 82 a 和 b 块由检查员填写 X X 第 43、84 a 和 b 块由牙医填写(必须为第 1 类或第 2 类) X X 第 59、61、63、66、68、69(根据需要为 60)块由验光师填写(根据 AR 40-501、第 5-3 章和 DA PAM 40-502) X X 块71 由听力学家完成(附上 DD 表格 2216E(听力测试文件)- H2 或 H3 需要豁免)X X 第 74a 块体检合格,符合“工兵培训/学校或工兵领袖课程/工兵”资格 X X 第 76 块列出任何需要豁免的取消资格的疾病/诊断以及豁免批准日期 X X 第 82a&b 块(PA、NP、MD、DO 打印并签名);以及 85 a&b(仅当 PA、ND 签署第 82 块时,MD/DO 才打印并签名;如果没有,可以留空)

使用 MATLAB GUI 进行运动物体检测和跟踪...
摘要:移动物体检测和跟踪是安全应用之一,由于其在视频监控、交通监控和图像识别等领域的应用,引起了计算机视觉研究人员的极大兴趣。移动物体检测涉及在连续帧中识别物体,而物体跟踪用于监控相对于感兴趣区域的移动。在本研究中,使用 MATLAB 中的 Guide 创建了 GUI(图形用户界面),它提供软件应用程序的点击控制,无需学习语言或输入命令即可运行应用程序。在本文中,使用基于高斯混合模型的背景减法算法执行物体检测,该算法可以处理背景强度分布的较大变化,使用卡尔曼滤波器执行视频中的跟踪,该滤波器使用随时间观察到的一系列测量值,包含统计噪声和其他不准确性,并产生未知变量的估计值,这些估计值往往比仅基于单个测量值的估计值更精确,在物体周围绘制一个边界框以在物体在视频帧中移动时跟踪移动物体,每帧中物体的计数值显示在 MATLAB 命令窗口中。这里 MATLAB 与 Arduino 板(基于微控制器的板)连接,Arduino 板与 LED 连接,根据计数值 LED 的数量会发光。MATLAB 的计数值通过串行通信与 Arduino 板通信。关键词:移动物体检测、跟踪、引导、MATLAB、LED、Arduino、串行通信。
使用 MATLAB GUI 进行移动物体检测和跟踪...
摘要:移动物体检测和跟踪是安全应用之一,由于其在视频监控、交通监控和图像识别等领域的应用,引起了计算机视觉研究人员的极大兴趣。移动物体检测涉及在连续帧中识别物体,而物体跟踪用于监控相对于感兴趣区域的移动。在这项研究工作中,GUI(图形用户界面)是使用 MATLAB 中的 Guide 创建的,它提供软件应用程序的点击控制,无需学习语言或输入命令即可运行应用程序。本文使用基于高斯混合模型的背景减法算法进行物体检测,该算法可以处理背景强度分布的较大变化,并使用卡尔曼滤波器进行视频跟踪,该滤波器使用随时间观察到的一系列测量值,包含统计噪声和其他不准确性,并产生未知变量的估计值,这些估计值往往比仅基于单个测量的估计值更精确,在物体周围绘制一个边界框以跟踪视频帧中移动的移动物体,每帧中物体的计数值显示在 MATLAB 命令窗口中。在这里,MATLAB 与 Arduino 板(基于微控制器的板)连接,该板与 LED 连接,根据计数值,LED 的数量将发光。MATLAB 的计数值通过串行通信与 Arduino 板通信。关键词:移动物体检测、跟踪、指南、MATLAB、LED、Arduino、串行通信。

光学遥感图像中的物体检测调查
变化检测 (Bontemps et al., 2008; Chen and Hay, 2012; Contreras et al., 2016; Dissanska et al., 2009; Doxani et al., 2012; Doxani et al., 2008; Hussain et al. .,2013;Im 等,2008;等,2014;沃尔特,2004);土地覆盖和土地利用制图,包括植被、树木、水、住宅等。(Baker et al., 2013; Benz et al., 2004; Blaschke, 2003; Blaschke et al., 2011; Blaschke et al., 2008; Contreras et al., 2015; D'Oleire-Oltmanns et al. .,2014;德皮尼奥等人,2012; Doleire-Oltmanns 等人,2013 年;Drăguţ 和 Eisank 等人,2011 年; 2011;Lisita 等,2011; 2011;Tzotsos 等,2011;Walker 和 Briggs,2007;Zhou 等,2009;周和特洛伊,2008);滑坡测绘(Feizizadeh 等,2014;Li 等,2015b;Martha 等,2010;Martha 等,2011;Martha 等,2012;Stumpf 和 Kerle,2011)。

光学遥感图像中的物体检测调查
变化检测 (Bontemps et al., 2008; Chen and Hay, 2012; Contreras et al., 2016; Dissanska et al., 2009; Doxani et al., 2012; Doxani et al., 2008; Hussain et al. .,2013;Im 等,2008;等,2014;沃尔特,2004);土地覆盖和土地利用制图,包括植被、树木、水、住宅等。 (Baker 等人,2013 年;Benz 等人,2004 年;Blaschke,2003 年;Blaschke 等人,2011 年;Blaschke 等人,2008 年;Contreras 等人,2015 年;D'Oleire-Oltmanns 等人,2014 年德皮尼奥等人,2012;等,2013;Drăguţ 和 Eisank,2012;Eisank 等,2011;Kim 等,2011; Woodroffe,2011;Macfaden 等,2012;Myint 等,2011; 2012;Tzotsos 等,2011;Xie 等,2008;Zhou 和 Troy,2008;滑坡测绘(Feizizadeh 等,2014;Li 等,2015b;Martha 等,2010;Martha 等,2011;Martha 等,2012;Stumpf 和 Kerle,2011)。