XiaoMi-AI文件搜索系统
World File Search System体现
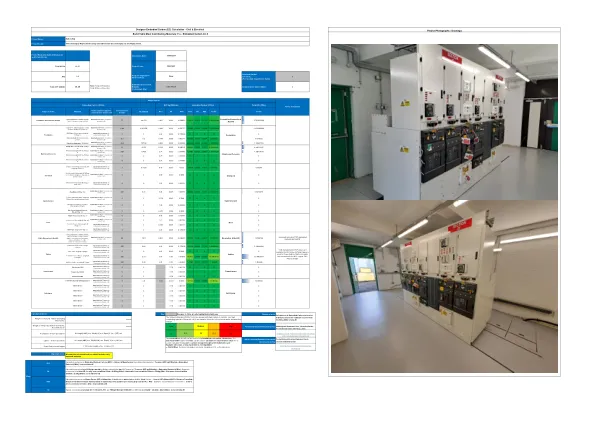
设计师体现碳(EC)计算
左侧的笔记表可用于帮助分解和审查计算。可以使用吨的结构木材值来计算固隔值,这用于计算整个构建生命周期中的碳存储量:20吨结构计时器x -1.64 kg(CO2E)= -32.8T(CO2E)。有关更多信息,请参见下面的选项卡上的注释A1-5。
计算机系统如何体现价值观 - Helen Nissenbaum
尽管我被誉为哲学家,但我在研究信息技术的伦理、社会和政治层面时,却越来越倾向于信息技术的科学和工程。我将这种兴趣追溯到与 Batya Friedman 合作的一项关于计算机系统偏见的研究项目(“计算机系统中的偏见”,ACM Trans.信息系统,1996 年 7 月,第340-346 页)。这个项目产生了一个引人注目而又神秘的想法:计算机和信息系统可以体现价值观。我发现这个想法如此引人注目,以至于从那时起它几乎劫持了我的工作道路,迫使我努力应对极其复杂的技术细节。它的神秘之处在于将价值观视为技术的一部分,而研究信息技术的社会、伦理和政治方面的学者和研究人员通常不会采用这种观点。
埃塞克斯体现的碳政策研究
尽管在英格兰没有建筑法规来减少具体的碳,但将具体的碳带入政策,但地方当局有责任通过计划政策来减轻气候变化。越来越多的地方当局(大伦敦当局,威斯敏斯特市议会,伦敦市,巴斯市和东北萨默塞特郡和布里斯托尔市议会)正在将体现的碳和/或全寿命考虑纳入计划政策。Essex已经建立了一个证据LED净零操作碳政策,该政策是超越监管的模型。因此,该证据基础建议采取体现的碳政策,以补充零净操作碳政策。为了对埃塞克斯(Essex)建筑物的设计和建造具有最大的直接影响,该证据基础的主要重点是前期体现的碳。为此,已经对三种房屋类型进行了全面的前期碳和资本成本建模,以帮助设定政策限制。在国内和非国内建筑物类型中提出了政策要求,涵盖:建筑物和循环经济的保留和改造;通过设计减少了体现碳;限制前期体现的碳排放;和整个终身碳报告。生命周期碳分析也作为本研究的一部分进行,以开始为潜在的未来政策要求提供信息。本研究的实施部分还为实施拟议的政策提出了建议,以便于申请人和计划官员。

印度基础设施的体现碳-KPMG LLP
15 资料来源:Francisco M De La Vega、Shimul Chowdhury、Barry Moore、Erwin Frise、Jeanette McCarthy、Edgar Javier Hernandez、Terence Wong、Kiely James、Lucia Guidugli、Pankaj B Agrawal、Casie A Genetti、Catherine A Brownstein、 Alan H Beggs、Britt-Sabina Löscher、Andre Franke、Braden Boone、Shawn E Levy、Katrin Õunap、Sander Pajusalu、Matt Huentelman、Keri Ramsey、Marcus Naymik、Vinodh Narayanan、Narayanan Veeraraghavan、Paul Billings、Martin G Reese、Mark Yandell和Stephen F Kingsmore,“人工智能可对罕见遗传病进行全面基因组解释并提出候选诊断方案”(Artificial intelligence enables comprehensive genome interpretation and nomination of candidate diagnoses for rare genetic diseases),PMCID: PMC8515723,PubMed Central生物医学和生命科学数据库,美国国立卫生研究院(NIH),美国国家医学图书馆(NLM),2021年10月14日
UKGBC体现的碳范围3测量和报告
从历史上看,尽管占全球总碳排放量的11%,但体现的碳还是在很大程度上被忽略了。近年来,潮流已经转变,作为一个行业,我们现在更加积极地解决具体的碳,本报告的出版物说明了这一点。就目前而言,有关如何测量体现碳的指导,RICS统一生命周期碳评估标准将成为一致的碳测量的世界领先标准。但是,我们的行业落后于包括具体碳在内的测量,报告和减少范围3。这是取得积极进步的障碍,并强调了为什么本报告的发布如此重要。通过借鉴跨行业数据,它代表了向前迈出的一大步,即定义我们应该如何处理体现的碳。

技术中价值的体现:理论与实践
rednoise.org › daniel › res › pdfs › emb... PDF 作者:M Flanagan · 被引用次数:421 — 作者:M Flanagan · 被引用次数:421 支持将价值观融入系统和设备原则的人,会发现应用经过磨练的标准设计方法并不容易。

新结构中的体现碳减少
建筑师,设计师和建筑公司有很大的机会通过改进的设计和建筑实践,利用低体现的碳材料和产品,以及使用再生材料/重复使用废料的策略,通过改进的设计和建筑实践,包括改进的设计和建筑实践,减少新建筑物的具体碳。本文档旨在作为有兴趣在其新建筑建筑项目中减少体现碳的建筑商,建筑师和公司的简要参考文献文件。参考指南提供了关键术语,策略,工具和数据库,标准和可用资源的概述,以帮助实现低碳新建筑。有关如何测量,减少和报告建筑产品中具体体现的碳排放的更多信息,请参阅RMI对先进的建筑结构的体现碳的简介:体现碳测量,还原和报告的基础知识。1


设计体现数学学习的理论和实践
体现的数学学习是基于人类通过有目的的运动,感官的使用以及创造和利用工件与身体和社会环境互动的能力。作为一个田间范式,体现的学习源于认知科学的体现转弯,它坚持认为,感知和动作是我们思维的形式上是我们思维的组成型 - 认知是固有的模态和位置的活动(例如,Chemero,2013),它吸引了身体与世界与世界(Gibson,gibson,1986,1986年)的物理互动。因此,认知(包括学习和知识)源于感知和运动系统的活动,因此,依次是由身体的物理特性和运动能力塑造的(Glenberg,2010年)。这些想法为更新课程设计和学习和教学资源提供了强大的动力(Shapiro&Stolz,2019年)。