XiaoMi-AI文件搜索系统
World File Search System信号控制

“石头剪刀布AI”我绝不会输!
这是一个简单的演示,您可以和客户玩石头剪刀布。它是在配备 AMD 的 SOM(系统模块)“Kria™ K26 SoM”的“KR260 机器人入门套件”上实现的。 输入:请在USB摄像头前展示“石头、剪刀、布”。 处理:在ROS2(机器人操作系统)下,AI推理处理单元与机械手控制单元应用程序分离,对输入图像进行“手势分类”,输出PWM信号控制机械手。 输出:经过上述处理后,产生以下两个输出。输出1:将“手势分类”的结果输出到显示器。 ⇒ 根据顾客所出的手牌(石头、剪刀、布),通过AI推理,即AI的预测,显示获胜手牌。 输出2:根据处理结果,控制“机械手”中实现的伺服电机,帮助客户获胜。 ⇒ 下面的例子中,视频输入是“石头”,所以“机械手”会变成“布”的形状来获胜。
背景方法目标结果cont'...
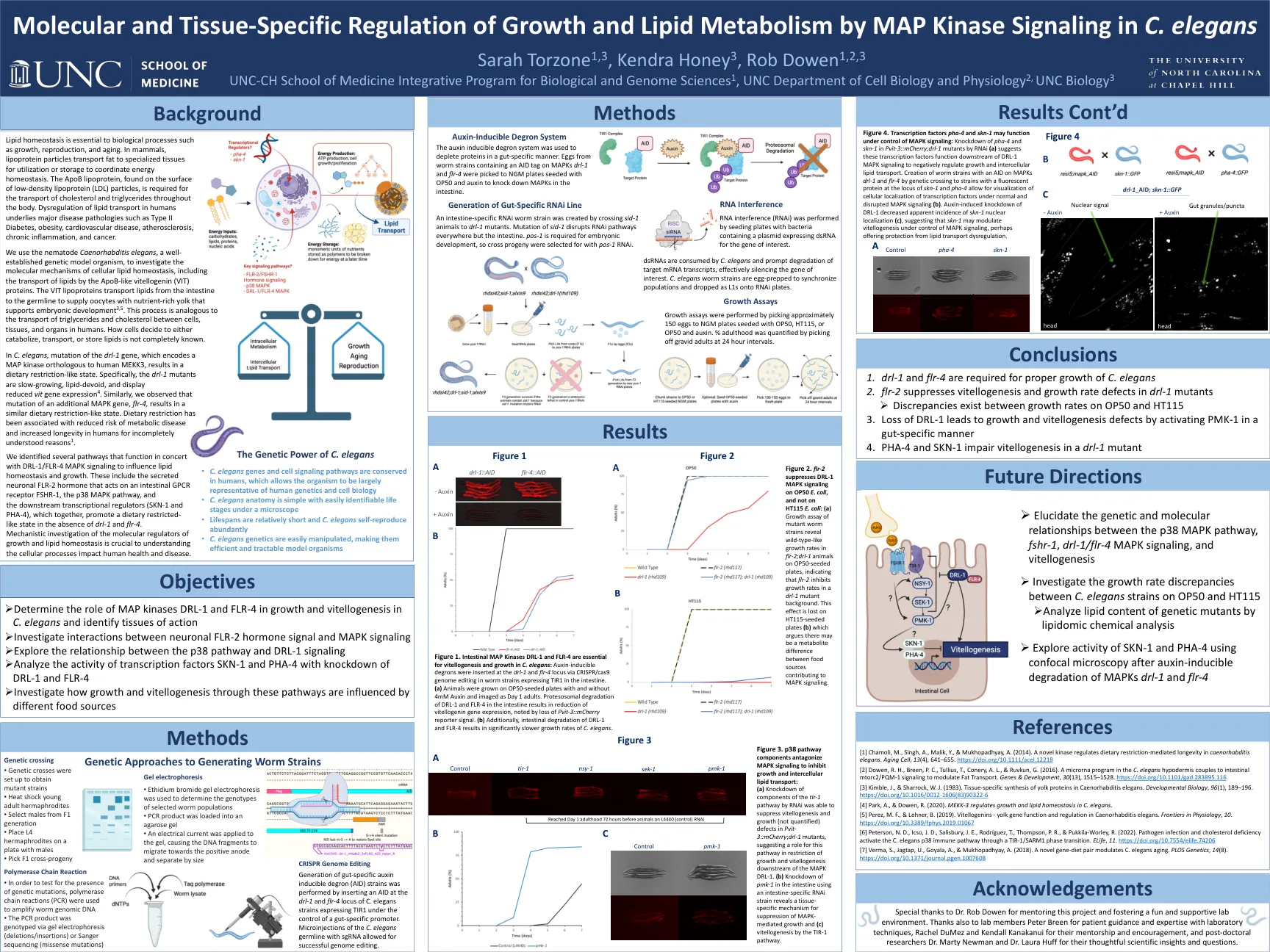
图4。转录因子PHA-4和SKN-1可能在MAPK信号控制下起作用:PVIT-3 :: MCHERRY中PHA-4和SKN-1的敲低; RNAi(a)的DRL-1突变体(a)表明,这些转录因子在DRL-1 MAPK信号的下游作用,以负调节生长和细胞间的Lipid Lipid运输。通过遗传交叉在SKN-1和PHA-4的基因座和PHA-4的菌株中菌株创建蠕虫菌株,并在MAPKS DRL-1和FLR-4上辅助,从而可以在正常和破坏的MAPK信号(B)下可视化转录因子的细胞定位(b)。生长素诱导的DRL-1敲低DRL-1降低了SKN-1核定位(C)的明显发生率(C),这表明SKN-1可能会在控制MAPK信号传导的控制下调节植物生成,也许可以保护脂质转运失调。
综合BESS-PV系统的日期和日期计划提供频率调节
摘要 - 本文提出了一个由电池和光伏电厂组成的系统的最佳管理策略。此集成系统被调用以传递光伏功率,并同时向主网格提供基于下垂的主要频率调节。电池最新能源由功率偏移信号控制,该信号使用光伏能量产生预测和对操作频率调节所需的能量的预测确定。开发了两个级别的控制体系结构。日前的计划算法计划在日前市场上进行交易的能源文件,并定义集成系统能够在考虑日期提供的主要控制储备。在日常操作中,第二级算法使用更新的信息纠正了派遣计划,以确保连续可靠的服务。两种控制算法都考虑到使用随机优化的光伏生成和频率动力学的不确定性。

城市地区的动态交通信号系统yolo vs
电子邮件:murugeshankalai2610@gmail.com摘要高效的交通管理对于确保在高流量城市地区安全安全旅行至关重要。延误是由人口稠密的地区的拥塞造成的,其流动性高和商业人口会直接或间接影响公众的日常生活。该项目着重于实施动态信号控制系统,该系统利用AI驱动的技术根据实时交通密度调整流量信号正时。使用基于YOLO的对象检测和MOG2移动对象检测算法,该系统从CCTV摄像机处理视频供稿来计算车辆密度并动态优化信号流动。通过计算信号处的密度,可以在优化的时间使用时清除拥塞。该系统减轻延误,尤其是在高峰时段,可确保不需要手动干预的情况下更顺畅的城市运输。关键字:动态流量信号控制,对象检测算法 - Yolo(您只看一次),Mog2(高斯的混合物)

线粒体限制细胞死亡的调节蛋白...
先天和adapɵve免疫力在脊椎动物中协调一致,以恢复病原体入侵或其他侮辱后恢复体内平衡。与所有体内稳态电路一样,免疫力依赖于可以用细胞或分子项进行分析的传感器,传感器和效果的集成系统。在细胞水平上,T和B淋巴细胞起到了免疫力的作用,该臂是对检测给定损伤的先天免疫细胞转导的信号而动员的。这些先天细胞散布在体内,包括DendriɵC细胞(DC),这是病原体侵袭和肿瘤生长的主要免疫传感器。在分子水平上,DC具有直接感知病原体存在和ssue损伤的受体,并信号控制伴随伴侣或调节编码调节免疫力的e ector蛋白的大量基因。该讲座将集中于了解DC如何整合环境信号以促进对癌症的免疫力,并应用于免疫疗法。

基于皮层脑电图的大脑研究现状...
或功能受限的患者,使用脑信号控制辅助医疗设备的能力将极大地改善生活质量。例如,患有肌萎缩侧索硬化症 (ALS) 或四肢瘫痪的患者在交流和运动控制方面有严重的障碍。对于 ALS 患者,眼动追踪可以为这些人提供控制设备的选择,但这项技术依赖于光照条件和完全眼球活动,而这在 ALS 晚期可能会受到限制。1 最近两项基于皮层脑电图 (ECoG) 的脑机接口 (BCI)(记录、放大和转换成外部设备计算机命令的系统)的研究为这些患者通过恢复交流或运动控制能力来改善对身体限制的自我管理带来了希望。2,3 在这篇综述中,我们主要关注两种功能障碍和发病率高的疾病——ALS 和四肢瘫痪,BCI 技术在这两种疾病中得到了最广泛的应用。

基于BCI系统的脑电信号控制无人机运动
摘要。脑机接口使个人能够通过脑电图 (EEG) 信号与设备进行通信,在许多使用脑电波控制单元的应用中都是如此。本文介绍了一种使用 EEG 波通过眨眼和注意力水平信号控制无人机运动的新算法。通过使用支持向量机算法对眨眼进行分类并通过人工神经网络将其转换为 4 位代码,对获得的信号识别进行优化。线性回归法用于将注意力分为具有动态阈值的低级或高级,从而产生 1 位代码。算法中的运动控制由两个控制层构成。第一层提供眨眼信号的控制,第二层提供眨眼和感知到的注意力水平的控制。使用单通道 NeuroSky Mind-Wave 2 设备提取和处理 EEG 信号。所提出的算法已通过对 5 个不同年龄个体的实验测试进行了验证。结果表明,与现有算法相比,该算法具有较高的性能,对 9 个控制命令的准确率为 91.85%。该算法最多可处理 16 个命令,准确率高,适用于许多应用。

自适应交通信号控制的加强学习
摘要 - 城市地区对道路使用的需求不断增长,导致了巨大的交通拥堵,构成了挑战,这些挑战仅通过基础设施扩张而减轻了昂贵的挑战。作为替代方案,优化现有的流量管理系统,尤其是通过自适应交通信号控制,提供了有希望的解决方案。本文探讨了使用加固学习(RL)来增强相互作用的交通信号操作,旨在减少没有大量传感器网络的拥塞。我们介绍了两种基于RL的算法:一个基于回合的代理,该算法根据实时队列长度动态优先考虑流量信号,以及一个基于时间的代理,该代理在遵循固定相位周期的同时根据交通条件调整信号相位持续时间。通过将状态表示为标量队列长度,我们的方法简化了学习过程并降低了部署成本。使用七个评估指标在四个不同的交通情况下对算法进行了测试,以全面评估性能。仿真结果表明,这两种RL算法都显着超过常规交通信号控制系统,突出了它们有效改善城市交通流的潜力。
基于脑电图的假肢控制综合研究
简介/目的:脑电图 (EEG) 信号对假肢控制技术的发展有很大影响。EEG 信号是人体运动功能研究的主要工具。使用脑信号控制假肢的研究仍处于早期阶段。脑电波控制的假肢在过去几年中引起了研究人员的关注。方法:已经进行了多项研究,系统地回顾已发表的文章,以便为研究人员和专家提供目前假肢和其他技术中使用的最先进的基于 EEG 的控制技术的全面总结。结果:研究、比较和筛选了 175 篇文章,仅包括与研究有密切联系的文章。结论:本研究有三个目标。第一个目标是收集、总结和评估 2011 年至 2022 年期间发表的研究信息。第二个目标是广泛报告与当前研究相关的该领域整体实验结果。该项目系统地开展,旨在为所有专家和科学家提供关于基于脑电图的假肢控制研究现状的丰富图像和扎实证据。第三个目标是认识到需要进一步研究的知识空白,并为该领域的未来研究提供方向建议。
使用肌电图控制的机器人时,大脑活动反映了对延迟输入的主观反应
在各种实验环境中,肌电图 (EMG) 信号已用于控制机器人。基于 EMG 的机器人控制需要控制的内在参数,这使得用户很难理解输入协议。当未提供适当的输入时,系统的响应时间会发生变化;因此,无论实际延迟如何,都应调查用户的主观延迟。在本研究中,我们调查了延迟的主观感知对大脑激活的影响。在受试者使用 EMG 信号控制机械手时进行脑部记录,这需要基本的处理延迟。我们使用肌肉协同作用来执行机械手的抓握命令。在通过抓握手来控制机器人后,每次试验都会应用四个额外延迟持续时间(0 毫秒、50 毫秒、125 毫秒和 250 毫秒)之一,并指示受试者回答延迟是自然的、额外的还是他们不确定。我们根据回答(“确定”和“不确定”)比较了大脑活动。我们的结果表明顶叶的 θ 波段存在显著的功率差异,并且这个时间范围包括受试者感觉不到延迟的间隔。我们的研究提供了重要的见解,在构建自适应系统并评估其可用性时应考虑这些见解。