XiaoMi-AI文件搜索系统
World File Search System俯仰角
一架空客 A310-324 飞机,注册号为 YR·LCC
06:07:58 UTC,副驾驶请求收起前缘缝翼,但机长未执行该操作。此时飞机正通过磁航向 013 度,高度 3800 英尺,速度 185 节,正在下降。飞机俯仰角下降 16.5 度,左倾角也下降 18 度。当时达到的推力不对称为 28 TRA 度,EPR 为 0.27。


基于并网双馈感应发电机的风电场智能控制系统综述 I. Hamdan 1,
摘要:本综述研究重点关注并网双馈感应发电机 (DFIG) 风电场智能控制系统中使用的各种方法。本文回顾了一种使用模糊协调 PI 的控制器,该控制器建议用于在大型风电场发生干扰时通过降压-升压转换器 (DC-DC 转换器) 改善与 DFIG 耦合的超级电容器 (SC) 的动态性能。此外,本研究回顾了一种俯仰角控制,用于在不同风速下调节风力涡轮机 (WT) 叶片的角度,以控制功率并安全运行 WT。在俯仰角上实施人工智能控制 (模糊方法) 取代传统控制以提高系统性能,模糊方法用于在各种工作条件下自动调整传统控制参数。然后,本文回顾了一种开发的控制技术,该技术使用区间型 2 模糊逻辑控制 (FLC) 调整 PI 来为由 DFIG 操作的 WT 进行最佳扭矩调节。建议的控制可调节机械转子速度的误差并产生实现最大输出功率的最佳扭矩。根据现有文献的结果,引入了 SC 到三相四线有源电力滤波器 (APF) 直流链路的集成,方法是使用由模糊控制方法控制的接口三级双向降压-升压转换器。关键词:智能控制系统;风能;电力电子;双馈感应发电机;最大功率跟踪。

Aircraft carrier landing process simulation ... - 中国舰船研究
从而安全完成拦阻着舰[6~7]。目前,应用最为广泛的着舰技术是等角滑翔技术。在着舰的最后阶段,舰载机在截获合适的下滑道后,保持相同的下滑道角、俯仰角、速度和下沉率,直至与飞行甲板接触,实现撞击着舰[8-9]。该技术的优点是在着舰前最关键的20s内,飞行员只需保持已有飞行状态,修正舰船运动、气流场等引起的误差,避免了复杂操作可能带来的误差与危险[10-11]。等角滑翔技术的关键是飞行员必须准确获取下滑道及其相对位置信息。

Chia-Wei Chen*、Matthias Hartrumpf、Thomas Längle 和 Jürgen Beyerer 通过四分之一波片增强灵敏度的滚动角传感器
摘要:姿态计量(滚转、俯仰和偏航)在许多不同领域发挥着重要作用。与俯仰角和偏航角相比,滚转角被认为是角位移中最难测量的量,因为滚转角的旋转轴与探测光束平行。在本文中,提出了一种灵敏度增强的滚转角传感器。其原理基于传感单元(四分之一波片)的偏振变化。通过 Mueller 矩阵形式分析了偏振模型。斯托克斯参数由斯托克斯偏振计检测。新颖的同轴设计通过固定的四分之一波片提高了灵敏度并降低了光学系统对准的复杂性。所提出的传感器提供了一种简单的装置来测量滚转角,具有 0.006 ∘ 的高灵敏度和 180 ∘ 的长无模糊测量范围。
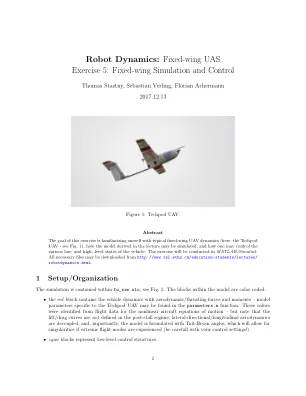
固定翼仿真与控制 - 机器人动力学
任务 2:是否可以选择一组手动控制偏差(和油门设置)来稳定机身 x 轴空速分量 u =13 m s − 1 的开环直线、水平和稳定飞行?如果可以,将控制信号(标准化)设置记录为微调,记录在初始条件向量以及低级控制块(u E 、u A 、u R )和高级控制块(u T )中。这些将作为下一步控制器设计的微调偏差。蓝色的配平用户输入块采用标准化值,即 ∈ [ − 1 , 1]。不必担心获得完美的配平 - 因为我们稍后可能会对其进行改进。进一步记录稳定状态俯仰角 θ - 将此量输入高级控制块的“θ 配平”用户输入源以及“姿态模式开关”左侧的“用户姿态设定点”块。
复飞期间高度损失 - BEA
11:14:14,在 401 英尺高度和 117 英尺高度,机组人员按下动力杆上的 TO/GA 按钮(下图 1 中的 点)进入 TO/GA 模式,并设置机头上仰姿态。由于 A/T 脱离后未手动启动,因此它没有自动启动,机组人员手动将动力杆向前推到对应于 N1 约 90% 的位置。飞机在恢复高度之前达到了最低无线电高度表高度 73 英尺。MASTER CAUTION 灯亮起十二秒(3)。尽管控制杆 (4) 上有向下机头的输入,但发动机推力和机头上仰配平的自动增加使俯仰角增加到 18°,略高于飞行指引仪 (F/D) 水平杆 (15°)。垂直速度迅速增加到 4,000 英尺/分钟。

设计,制造和评估由旋转成型制造的小型涡轮刀片
摘要可再生能源的概念已在世界上深深地根深蒂固,吸引了越来越多的研究人员和行业专业人员投入大量资源来推动更有效的系统的开发。虽然当前的大型风力涡轮机叶片达到50 m的长度,并且通常作为单个实体制造,但本研究的重点是专门针对小型涡轮机量身定制的刀片剖面的设计和评估。使用旋转成型制造刀片,采用各种聚合物(包括热塞和热塑性)的聚合物。为增强其机械性能,将泡沫掺入聚氨酯和聚乙烯叶片中。通过机械分析来评估各种配方和泡沫来评估合适的刀片。空气动力学分析是在不同的风速和俯仰角范围内进行的。结果表明功率系数(CP)接近0.5。
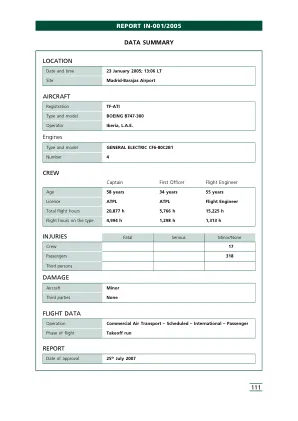
111 位置飞行数据报告机组人员飞机...
13:06:30 起飞滑跑时功率降低,纵向加速度很快达到 0.23 g。13:06:54 大约 24 秒后,在指示空速 98.4 kt 时,飞机降低起飞功率并开始刹车。13:06:55 飞机的速度在接下来的一秒钟内仍在增加,最大速度达到 98.9 kt IAS;其减速度达到 0.27 g,俯仰角超过加速期间保持的 -0.9 度,达到 -1.3 度。13:06:56 两秒后,速度大幅降低至 62 kt(尽管这个读数可能是虚假的),3 号和 4 号发动机的反推力已经启动。纵向和横向加速度读数每隔四分之一秒记录一次,在这一秒内会在 ± 1g 之间波动两次。

一种基于雷达-光电联动控制的多传感器协同探测目标跟踪方法
摘要。雷达是跟踪目标的常用手段,在敌方主动干扰下,常常会导致目标失去跟踪,从而造成雷达失去对目标的连续跟踪。为提高跟踪效果,建立了一种基于雷达光电联动控制的多传感器协同探测目标跟踪方法。研究以雷达光电联动、恒速度(CV)、恒加速度(CA)和电流统计模型(CSM)作为运动目标的数学模型,针对不同运动状态下的目标,以及单传感器电子支援措施(ESM)和多传感器电子支援措施(ESM)、红外搜索与跟踪(IRST),对比了改进的交互式多模型(IMM)和标准IMM。研究结果表明,在变速运动中,采用改进的IMM算法和多传感器进行目标跟踪,目标的方位角和仰角跟踪误差较小,可以有效解决CV、CA等运动模式转换过程中模型失配的问题。方位角和俯仰角图像曲线波动较小,稳定性较高,该方法可以取得较好的跟踪效果。