XiaoMi-AI文件搜索系统
World File Search System光标

具有人工智能副驾驶的非侵入式脑机接口控制
运动脑机接口 (BMI) 解码神经信号,帮助瘫痪患者移动和交流。尽管在过去二十年中取得了重大进展,但 BMI 仍面临着临床可行性的关键障碍。侵入式 BMI 可以实现熟练的光标和机械臂控制,但需要神经外科手术,对患者构成重大风险。非侵入式 BMI 没有神经外科手术风险,但性能较低,有时使用起来非常令人沮丧,阻碍了广泛采用。我们通过构建高性能的非侵入式 BMI 朝着打破这种性能风险权衡迈出了一步。17 限制非侵入式 BMI 解码器性能的关键限制是其较差的神经信噪比。为了克服这个问题,我们贡献了 (1) 一种新颖的 EEG 解码方法和 (2) 人工智能 (AI) 副驾驶,可以推断任务目标并帮助完成行动。我们证明,借助这种“AI-BMI”,结合使用卷积神经网络 (CNN) 和类似 ReFIT 的卡尔曼滤波器 (KF) 的新型自适应解码方法,健康用户和瘫痪参与者可以自主且熟练地控制计算机光标和机械臂。使用 AI 副驾驶可将目标获取速度提高 4 倍。在标准的中心向外光标控制任务中,目标获取速度提高了 3 倍,并使用户能够控制机械臂执行顺序拾取和放置任务,将 4 个随机放置的块移动到 4 个随机选择的位置。随着 AI 副驾驶的改进,这种方法可能会产生临床上可行的非侵入式 AI-BMI。26

研究论文:使用 SLAM 实现半自主移动机器人辅助系统远程操作的脑机接口
所提出的辅助混合脑机接口 (BCI) 半自主移动机械臂展示了一种设计,该设计 (1) 通过使用传感器观察环境变化并部署替代解决方案而具有适应性,(2) 通过非侵入式脑电图帽接收来自用户脑波信号的命令而具有多功能性。所提出的机器人由三个集成子系统、混合 BCI 控制器、全向移动基座和机械臂组成,其命令映射到与一组特定身体或心理任务相关的用户脑波上。传感器和摄像头系统的实施使移动基座和手臂都具有半自主性。移动基座的 SLAM 算法具有避障能力和路径规划能力,可帮助机器人安全操纵。机械臂计算并部署必要的关节运动,以拾取或放下用户通过摄像头馈送上的脑波控制光标选择的所需物体。使用 Gazebo 对子系统进行了验证、测试和实施。BCI 控制器和子系统之间的通信是独立测试的。使用与每个特定任务相关的预录脑电波数据循环来确保执行移动基座命令;使用相同的预录文件来移动机器人手臂光标并启动拾取或放下动作。进行最终系统测试,其中 BCI 控制器输入移动光标并选择目标点。辅助机器人手臂的成功虚拟演示表明恢复残疾用户的运动能力和自主能力是可行的。

2 1. 关于计算机 练习 1. 勾选(✓)正确的...
(iii) 箭头键 2. 在正确语句中写“ T ”,在错误语句中写“ F ”: 答:a. Enter 键用于将光标移动到下一行。 :[ T ] b. Page Up 键将页面上移。 :[ T ] c. Delete 键用于删除光标左侧的字母。 :[ F ] d. Back Space 键删除光标右侧的字符。 :[ F ] e. Caps Lock 键用于输入大写或小写字母。 :[ T ] 3. 填空: 答:a. 键盘上有许多键,它们的作用不同。 b. Delete 键用于删除光标右侧的字母。 c. 空格键是键盘上最长的键。 d. 键盘通常称为 QUERTY 键盘。 e. Enter 键也称为 Return 键。 4. 写出以下键的功能: 答:a. Caps Lock 键:Caps Lock 键用于输入大写字母。按此键一次,可打开该键以输入大写字母。再次按此键可关闭该键以输入小写字母。b. 空格键:空格键是键盘上最长的键。此键用于在各种类型的数据和信息之间留出空格。数据和信息可以是字符、单词、句子和其他结构。c. Enter 键:Enter 键用于将光标移动到显示器的下一行。它也被称为回车键。d. 字母键:字母键显示从 A 到 Z 的字母。这些键帮助我们输入单词和句子。字母键共有 26 个。
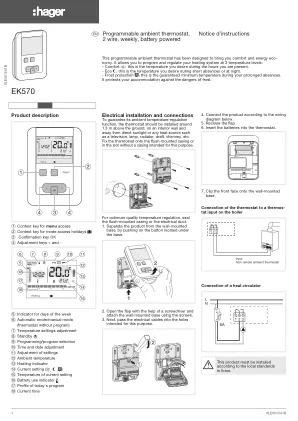
z可编程的环境恒温器,2台电线,每周,电池供电的通知d'unesstimes
将现有程序(P1,P2或P3)分配给一周中的一个或多天。•按键1菜单将光标放在prog下。一周中七天的指标闪烁。•按键4 +选择哪一天或几天,以将程序分配给。使用OK键确认。•P1闪烁。按键4 +选择要应用的程序。使用OK键确认。为例,将P2分配给五个工作日的组,然后将P1分配给两个周末的小组:•按KEY 1菜单将光标置于Prog下。一周中七天的指标闪烁。•按键4 +选择以影响五天的组(五天闪烁)。使用OK键确认。•P1闪烁。按键4 +选择(P2闪烁)。使用OK键确认。•按键4 +选择2个周末(2个周末闪烁的组)组。使用OK键确认。•P1闪烁。使用OK键确认。恒温器返回自动模式。

安全调查最终报告 - SKYbrary
ATM – 假定温度法 CRM - 机组资源管理 CCD - 光标控制装置 CCS - 光标控制选择器 CVR - 驾驶舱语音记录器 CDU - 控制显示单元 CG - 重心 CG MAC% - 以 % 表示的 CG 平均气动弦 EAFR - 增强型机载飞行记录器 EICAS - 发动机指示和机组警报系统 EFB - 电子飞行包 FMC - 飞行管理计算机 固定降低率 – TO/TO1/TO2 FLAR - 飞行日志和飞机释放 HUD - 平视显示器 MFD - 多功能显示器 MFK - 多功能键盘 MCP - 模式控制面板 MAC - 平均气动线 OPT - 机载性能工具 OMA - 操作手册 PF - 飞行飞行员 PM - 飞行员监控 PIC- 机长 QRH - 快速参考手册 TPR - 涡扇功率比 TOW - 起飞重量 V1 - 起飞决策速度 Vr - 旋转速度 V2 - 起飞安全速度 Vref - 参考速度 Vmu -最小脱杆速度 Vzf - 零襟翼机动速度 ZFW - 零燃油重量

对孤立音素的开始和持续神经反应的证据
我们开发了一项基于语音的自定步调光标控制任务,以在单独发出音素(即元音、鼻音和摩擦音)时收集相应的颅内神经数据。两名植入颅内深度电极以进行临床癫痫监测的患者通过实时处理麦克风输入执行闭环语音光标控制。在事后数据分析中,我们搜索了与非特定语音或特定音素的发生相关的神经特征。与之前的研究一致,我们在颞上回的多个记录点观察到了对语音的开始和持续反应。基于高达 200 Hz 的窄频带中的不同激活模式,我们以 91% 的准确率(机会水平:50%)跟踪语音活动,并以 68% 的准确率(机会水平:20%)将单个话语归类为五个音素之一。我们提出,我们的框架可以扩展到其他音素,以更好地描述在没有语言背景的情况下产生和感知语音的神经生理机制。总的来说,我们的研究结果为使用颅内电极开发语音脑机接口提供了补充证据和信息。索引词:音素识别、颅内电极、语音开始、持续语音、脑机接口

外周触觉反馈对大脑皮层内的影响...
摘要 — 皮层内脑机接口 (iBCI) 为瘫痪患者提供了一种通过从大脑活动解码的信号来控制设备的方法。尽管这些设备最近取得了令人瞩目的进展,但它们的控制水平仍然无法达到健全人的水平。为了实现自然控制并提高神经假体的性能,iBCI 可能需要包含本体感受反馈。为了通过机械触觉刺激提供本体感受反馈,我们旨在了解触觉刺激如何影响运动皮层神经元并最终影响 iBCI 控制。我们为四肢瘫痪患者的后颈提供了皮肤剪切触觉刺激来替代本体感受。通过使用单丝测试套件评估触觉灵敏度来确定颈部位置。参与者能够以 65% 的准确率正确报告 8 个不同方向的后颈皮肤剪切。我们发现运动皮层单元对剪切刺激表现出感觉反应,其中一些单元对刺激有强烈的响应,并可以通过余弦形函数很好地建模。我们还演示了在线 iBCI 光标控制,该控制由解码的命令信号驱动,并带有连续的皮肤剪切反馈。与纯视觉反馈条件相比,当参与者获得触觉反馈时,光标控制性能略有提高,但效果显著。

外周触觉反馈对大脑皮层内的影响...
摘要 — 皮层内脑机接口 (iBCI) 为瘫痪患者提供了一种通过从大脑活动解码的信号来控制设备的方法。尽管这些设备最近取得了令人瞩目的进展,但它们的控制水平仍然无法达到健全人的水平。为了实现自然控制并提高神经假体的性能,iBCI 可能需要包含本体感受反馈。为了通过机械触觉刺激提供本体感受反馈,我们旨在了解触觉刺激如何影响运动皮层神经元并最终影响 iBCI 控制。我们为四肢瘫痪患者的后颈提供了皮肤剪切触觉刺激来替代本体感受。通过使用单丝测试套件评估触觉灵敏度来确定颈部位置。参与者能够以 65% 的准确率正确报告 8 个不同方向的后颈皮肤剪切。我们发现运动皮层单元对剪切刺激表现出感觉反应,其中一些单元对刺激有强烈的响应,并可以通过余弦形函数很好地建模。我们还演示了在线 iBCI 光标控制,该控制由解码的命令信号驱动,并带有连续的皮肤剪切反馈。与纯视觉反馈条件相比,当参与者获得触觉反馈时,光标控制性能略有提高,但效果显著。

修订了Xposat Mission brochure.cdr
通过两次重新启动PS4,在650公里处注入XPOSAT后,PS4阶段将降低至350公里,〜9.6度轨道。PS4中剩下的推进剂将通过主要发动机作为光标处置,以使PS4阶段的安全性在将来计划在大气中重新进入实验。氧化剂将首先以预定的操作序列进行燃料。通过排泄储罐压力来发泄的现有支出阶段钝化方案也将是活跃的。PS4的钝化后,对阶段的控制被转移到诗歌航空电子。

感觉和运动责任纠缠的影响
四肢瘫痪患者表示,恢复手臂和手部功能是恢复独立性最重要的因素之一。我们研究的总体目标是开发辅助技术,使四肢瘫痪患者能够控制功能性伸手动作。这项研究是朝着我们的总体目标迈出的第一步,它评估了在实验环境中使用眼球运动来控制效应器运动的可行性。我们旨在了解对眼睛施加的额外运动要求如何影响功能性伸手过程中的眼手协调。我们特别感兴趣的是,当眼睛的感觉和运动功能因额外的运动责任而纠缠在一起时,眼球注视误差会受到怎样的影响。我们记录了参与者在伸手去拿显示器上的目标时的眼球和手部运动。我们在参与者的注视点位置处显示一个光标,这可以被认为类似于对辅助机器人手臂的控制。为了测量眼球注视误差,我们使用离线过滤器从原始眼球运动数据中提取眼球注视。我们将注视点与显示器上显示的目标位置进行了比较。结果表明,人类不仅能够利用眼球运动将光标引导至所需位置(1.04 ± 0.15 厘米),而且误差与手的误差相似(0.84 ± 0.05 厘米)。换句话说,尽管在直接控制效应器的眼球运动时,眼睛承担了额外的运动责任,但协调功能性伸展运动的能力并未受到影响。这项研究的结果支持使用眼睛作为控制运动的直接命令输入的有效性。