XiaoMi-AI文件搜索系统
World File Search System光检测

产生高度纯的多能干细胞衍生的肌源细胞和肌管
摘要:光检测和范围(LIDAR)技术现在已成为许多应用程序中的主要工具,例如自主驾驶和人类 - 机器人协作。基于点云的3D对象检测因其在挑战性的环境中对相机的有效性而在行业和日常生活中广泛接受。在本文中,我们提出了一种模块化方法,可以使用3D激光雷达传感器检测,跟踪和分类人员。它结合了多个原则:用于对象分割的强大实现,带有本地几何描述符的分类版和跟踪解决方案。此外,我们通过在没有任何以前的环境知识的情况下通过运动检测和运动预测来获取和预测感兴趣的区域来减少要处理和预测感兴趣的区域的积分数量,从而在低绩效机器中实现了实时解决方案。此外,由于局限性的视图或极端姿势变化,例如蹲伏,跳跃和拉伸,我们的原型即使在具有挑战性的情况下也能够成功地检测和跟踪人员。最后,在室内环境中进行的多个真实的3D激光雷达传感器记录中测试并评估了所提出的解决方案。与最先进的方法相比,结果在人体的积极分类中特别高。

为数字孪生生成提供地理空间上下文
摘要:光检测和测距技术可以创建物理对象和环境的详细 3D 点云。因此,它有可能为各种需要了解周围环境并与之交互的信息物理系统的运行提供有价值的信息,例如自动驾驶汽车和机器人。点云还可以成为创建不同资产和系统运行环境的数字表示的基础。本文概述了一种系统架构,该架构将 LiDAR 扫描提供的地理空间上下文信息与信息物理系统组件的行为模型相结合以创建数字孪生。行为和数据之间的明确区分使所提出的数字孪生架构有别于现有方法(主要关注数据方面),并通过可执行过程模型促进上下文数字孪生生成。疫苗物流自动化用例详细说明了如何将有关环境的信息用于执行运输准备任务的自主机器人的操作。除了支持操作之外,我们还建议将在物流过程的不同点从系统中检索到的上下文数据与有关可执行行为模型实例的信息相结合,作为数字孪生架构的一部分。随后,孪生可用于通过相关利益相关者促进系统和流程监控,并以用户为中心的方式构建上下文数据。

使用 III-V 胶体量子点进行快速近红外光电检测
胶体量子点 (CQDs) 因其可调带隙和溶液处理特性,是用于红外 (IR) 光检测的有前途的材料;然而,到目前为止,CQD IR 光电二极管的时间响应不如 Si 和 InGaAs。据推测,II-VI CQD 的高介电常数会导致由于屏蔽和电容而导致的电荷提取速度变慢,而 III-V 族(如果可以掌握其表面化学性质)则可提供低介电常数,从而增加高速操作的潜力。在初步研究中发现,砷化铟 (InAs) 中的共价特性会导致不平衡的电荷传输,这是未钝化表面和不受控制的重掺杂的结果。报道了使用两性配体配位进行表面管理,并且发现该方法同时解决了 In 和 As 表面悬空键。与 PbS CQD 相比,新型 InAs CQD 固体兼具高迁移率(0.04 cm 2 V − 1 s − 1),介电常数降低了 4 倍。由此产生的光电二极管实现了快于 2 ns 的响应时间——这是之前报道的 CQD 光电二极管中最快的光电二极管——并且在 940 nm 处具有 30% 的外部量子效率 (EQE)。
采用多平面光转换的超宽带偏振不敏感光学混合器
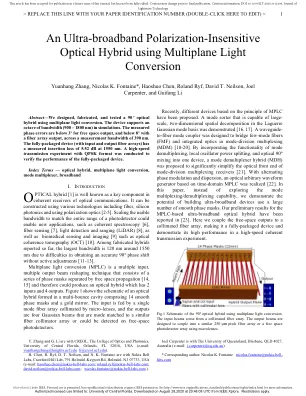
众所周知,光混合器 [1] 是光通信相干接收器中的关键组件。它可以采用多种技术构建,包括光纤、硅光子学和偏振光学 [2-5]。扩展可用带宽以匹配光电探测器的整个范围可以实现新的应用,例如相干光谱 [6]、光纤传感 [7]、光检测和测距 (LiDAR) [8],以及生物医学传感和成像 [9],例如光学相干断层扫描 (OCT) [10]。在迄今为止报道的制备的混合器中,最大的带宽为 120 nm,约为 1550 nm,这是因为如果不进行主动调整就难以获得精确的 90° 相移 [11-13]。多平面光转换 (MPLC) 是一种多输入、多输出光束重塑技术,由一系列由自由空间传播分隔的相位掩模组成 [14, 15],因此可以产生具有 2 个输入和 4 个输出的光混合器。图 1 显示了由 14 个光滑相位掩模板和一个金镜组成的多反射腔中形成的光学混合器的示意图。输入由微透镜准直的单模光纤阵列馈送,输出是四束高斯光束,这些光束与类似的光纤准直器阵列模式匹配,或者可以在自由空间光电探测器上检测到。

通过RICEAN分布拟合
对位置敏感的SIPM在所有光检测应用中都有用,需要少量读出通道,同时保留有关传入光的相互作用位置的信息。专注于2x2阵列的LG-SIPM,覆盖15的面积。5×15。 5 mm只有6个读数,我们提出了一种定量方法来评估图像重建性能。 该方法基于一种统计方法,以评估设备的精度(空间分辨率)和重建重点重心的精度(线性)。 通过大米概率分布函数拟合来实现此评估。 我们获得了平均传感器空间分辨率的最佳值81±3 µm(标准偏差),这是通过以通道输出信号的幅度重建每个位置来实现的。 相应的精度为231±4 µm。5×15。5 mm只有6个读数,我们提出了一种定量方法来评估图像重建性能。该方法基于一种统计方法,以评估设备的精度(空间分辨率)和重建重点重心的精度(线性)。通过大米概率分布函数拟合来实现此评估。我们获得了平均传感器空间分辨率的最佳值81±3 µm(标准偏差),这是通过以通道输出信号的幅度重建每个位置来实现的。相应的精度为231±4 µm。

yolov8基于激光雷达点云的对象检测的新方法
摘要 - 对象检测是自动驾驶汽车和高级驾驶员辅助系统(ADA)的重要感知任务。虽然已经对相机图像中的对象检测进行了广泛的研究,但通过光检测和范围(LIDAR)数据来解决此任务,这是由于其固有的稀疏性带来了独特的挑战。这项研究引入了一种基于激光雷达的对象检测的开创性方法,其中Lidar Point Cloud数据巧妙地转换为伪RGB图像格式,随后将最初用于基于相机的对象检测设计的Yolov8网络。在Kitti数据集中受过训练和严格评估,我们的方法表现出出色的性能,达到了令人印象深刻的平均平均精度(MAP)超过86%。该模型还在Tihan IITH iith自主导航数据集(TIAND)的某个点云上进行了测试。这个了不起的结果强调了拟议方法在利用LiDAR数据以进行健壮对象检测时的效率,从而有助于在自主驾驶和ADAS应用中提高感知能力。索引项 - Yolov8,点云,BEV,LIDAR,对象检测,ADAS

使用Resnet
1学生/研究学者,2名学生/研究学者,3名学生/研究学者计算机科学与工程学系(人工智能与机器学习)Vignana Bharathi技术研究所,Aushapur(V),Ghatkesar(M),Medchal Dist。 501301,印度Telangana,摘要:智能运输系统(ITS)在增强道路安全和优化交通管理方面起着至关重要的作用。 这些系统有效性的核心是对交通信号灯状态的快速而准确的检测和分类。 这项研究通过提出一种新颖的方法来实时交通光识别,为计算机视觉和机器学习的持续进步做出了贡献。 利用重新网络(残留网络)体系结构,我们的方法解决了各种环境条件所带来的多方面挑战,包括不利的天气,不同的照明和遮挡。 Resnet的深度学习能力使我们的系统能够辨别复杂的模式和功能,从而展示其对现实世界流量情景复杂性的适应性。 除了技术方面,该研究强调了准确的交通光检测和分类的重要性。 这些过程不仅是技术必需品,而且对优化交通流量,最大程度地减少拥堵并最终增强了现代城市环境动态环境内的道路安全性具有深远的影响。 这项研究有助于计算机视觉和机器学习中更广泛的论述,旨在为现实世界所带来的应用所带来的挑战提供实用的解决方案。1学生/研究学者,2名学生/研究学者,3名学生/研究学者计算机科学与工程学系(人工智能与机器学习)Vignana Bharathi技术研究所,Aushapur(V),Ghatkesar(M),Medchal Dist。501301,印度Telangana,摘要:智能运输系统(ITS)在增强道路安全和优化交通管理方面起着至关重要的作用。 这些系统有效性的核心是对交通信号灯状态的快速而准确的检测和分类。 这项研究通过提出一种新颖的方法来实时交通光识别,为计算机视觉和机器学习的持续进步做出了贡献。 利用重新网络(残留网络)体系结构,我们的方法解决了各种环境条件所带来的多方面挑战,包括不利的天气,不同的照明和遮挡。 Resnet的深度学习能力使我们的系统能够辨别复杂的模式和功能,从而展示其对现实世界流量情景复杂性的适应性。 除了技术方面,该研究强调了准确的交通光检测和分类的重要性。 这些过程不仅是技术必需品,而且对优化交通流量,最大程度地减少拥堵并最终增强了现代城市环境动态环境内的道路安全性具有深远的影响。 这项研究有助于计算机视觉和机器学习中更广泛的论述,旨在为现实世界所带来的应用所带来的挑战提供实用的解决方案。501301,印度Telangana,摘要:智能运输系统(ITS)在增强道路安全和优化交通管理方面起着至关重要的作用。这些系统有效性的核心是对交通信号灯状态的快速而准确的检测和分类。这项研究通过提出一种新颖的方法来实时交通光识别,为计算机视觉和机器学习的持续进步做出了贡献。利用重新网络(残留网络)体系结构,我们的方法解决了各种环境条件所带来的多方面挑战,包括不利的天气,不同的照明和遮挡。Resnet的深度学习能力使我们的系统能够辨别复杂的模式和功能,从而展示其对现实世界流量情景复杂性的适应性。除了技术方面,该研究强调了准确的交通光检测和分类的重要性。这些过程不仅是技术必需品,而且对优化交通流量,最大程度地减少拥堵并最终增强了现代城市环境动态环境内的道路安全性具有深远的影响。这项研究有助于计算机视觉和机器学习中更广泛的论述,旨在为现实世界所带来的应用所带来的挑战提供实用的解决方案。通过强调准确的交通信号识别的重要性,我们的研究试图推动该领域的进步,并可能对发展智能交通管理系统的发展产生潜在影响,这可能会对城市的流动性和安全性产生积极影响。索引术语 - 交通信号灯,重新系统,深度学习,计算机视觉。

历史景观的数字高程模型生成...
关键词 机载 LiDAR;DEM;过滤;地质考古学;微地形;景观可视化;多尺度概念 摘要 本文讨论了基于高密度机载 LiDAR(光检测和测距)数据生成高精度 DEM(数字高程模型),用于跨学科景观考古研究,研究比利时根特北部 Sandy Flanders 地区的定居历史和环境。目标是创建一个没有人工特征和地形伪影的详细地形表面,以 DEM 的形式,仅通过实现真实地面点来可视化自然和当前地形。这些特征和伪影的半自动去除基于地形矢量数据、视觉解释和坡度分析。最终构建了两个 DEM:(1)TIN(不规则三角网)模型,其固有的大文件格式限制了其在大规模上的可用性;(2)网格模型,可用于小规模、中规模和大规模应用。这两个数据集都用作使用历史资料中的辅助数据进行解释的图像。其实用性在田野模式和微田野地形的案例中得到了说明。从这个 DEM 开始,这项景观历史研究的方法主要是倒退性的,即从当代景观中仍然存在并不断移动的景观结构和元素开始

HESAI Group(Hsai US) 技术 中国经济
Hesai Group(HSAI)是三维光检测和范围(LIDAR)解决方案的全球领导者之一,它已经开发并生产了各种LIDAR解决方案和产品,用于高级驾驶员辅助系统(ADAS),自治移动性(AM)和Robotics的各种应用。在强大的技术能力(包括垂直整合技术和内部制造)的帮助下,Hsai能够提供具有更高性能,更高质量和较低成本的LiDAR产品,这使其能够增强与核心客户的关系并扩大规模效应。hsai已经记录了行业领先的财务业绩,我们很肯定,它有望随着对LiDar产品的不断增长而增长。在我们看来,更多的机器人技术和工业市场中的用例应进一步推动HSAI的扩展。我们希望HSAI在2024年的获利能力中看到一个偏移点,并估计2024E/2025E的非GAAP NP rmb9mn/141MN的非GAAP NP,通过增加其现有LIDAR产品的采用以及2025E的成本效益新AT系列产品的潜在启动,并提高了2025E的成本效益新的AT系列产品。我们的目标价为每张广告16.3美元,基于4.8x 2025e PS。在购买时开始。有望在不断上升的市场中实现强劲的增长。Yole Intelligence估计

在概念验证实验中证明 - 高速车内光学通信系统完全支持
光子模块,将光纤和动力电缆组合的线束,多个4K摄像头,光检测和射程(LIDAR)设备以及雷达。2。研究的背景是实现高级自主驾驶,高容量和低延迟的车载网络,该网络可以容纳越来越多的电子设备,例如摄像机和传感器,这是必不可少的。此外,该网络必须满足特定于车辆的严格要求,例如环境阻力,电磁兼容性和可靠性。在这项研究中,为了确保一个高度可靠的系统,团队拟议的虹吸管是一个通信网络,其中半导体激光器仅放置在处理车辆核心功能的中央电气控制单元(ECU)的主设备中。同时,基于硅光子集成技术的调节器/接收器被放置在管理车辆每个部分的区域ECU的网关设备中。通过二氧化硅单模式光纤促进它们之间的通信。3。研究设计和发现Siphon具有一个物理层,该物理层由数据传输网络(D-Plane)组成,具有超过50 GB/s的容量和控制信号传输网络(C-Plane)。它被设计为使用硅光子技术通过复制传输路径和光源来实现的冗余,以低成本和高度可靠的方式制造(图1)。从主设备传输的光穿过每个网关设备。