XiaoMi-AI文件搜索系统
World File Search System制动器

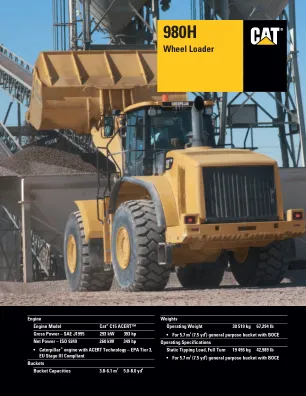
980H 轮式装载机规格,AEHQ5631-04
工业装载机。重型防护装置和专为工业应用(如废物和废料处理)设计的特殊功能使 980H 能够承受最恶劣的条件。可以为机器添加专为这些应用设计的作业工具。钢厂应用。钢厂配置提供了在这种恶劣环境中延长使用寿命和降低运营成本所需的额外保护。该配置包括关键部件的钢制防护装置、极端服务变速箱、重型发动机和变速箱支架、液压软管保护、绝缘电池安装、远程发动机关闭、远程停车制动器释放、变速箱超控、钢制电缆梯、钢制命令控制

astravan-owners-manual-january-2006.pdf - 沃克斯豪尔
简介 ................................................. 2 仪表 ................................................. 36 钥匙、车门、发动机罩 ........................ 66 座椅、内饰 .............................................. 87 安全系统 .............................................. 109 照明 ................................................. 134 车窗、天窗 ........................................ 141 TwinTop ................................................ 146 温度控制 ................................................ 153 Easytronic ............................................. 174 自动变速箱 ............................................. 182 带 ActiveSelect 的自动变速箱 ............................. 188 驾驶提示 ................................................. 196 节省燃油、保护环境 ........................................ 198 油耗、燃油、加油 ........................................ 200 催化转化器、废气 ........................................ 203 驱动控制系统 ........................................ 208 制动器 ................................................. 222 车轮、轮胎 ................................................. 226 车顶行李架、大篷车和拖车牵引 ........................ 234 自助服务 ................................................. 243 如果您有问题 ................................. 288 维护、检查系统 ........................ 290 车辆保养 .............................................. 302 技术数据 .............................................. 306 索引 .............................................. 342

机器人夹持器的自锁欠驱动机构
摘要 — 我们描述了一种新型机电一体化机器人夹持器的设计概念和第一个原型,该夹持器旨在安装在人形机器人上,以实现牢固(即锁定)和稳健的抓握。这种抓握可以理想地支持复杂的多接触运动,例如爬梯子或操纵复杂工具,同时节省能源。为此,我们提出了一种解决方案,即设计一种智能自锁欠驱动机构,该机构与执行器并联安装,当实现所需的抓握时自动触发。该设计通过差速齿轮利用夹持器和制动器之间的可调功率分配。我们的夹持器具有自适应、牢固抓握和节能的优势,并通过原型夹持器进行了实验。

使用可变排量的高效流体动力系统...
当今民用运输飞机的高升力系统由使用阀控固定排量液压马达的动力控制单元 (PCU) 驱动。图 9 显示了带有 PCU 的传统高升力传动系统的典型后缘(襟翼)。由于可靠性原因,PCU 由两个独立的液压执行回路驱动。两个液压马达的速度由差速齿轮 (DG) 相加。如果单个液压系统发生故障,高升力系统可以半速运行。整个传动系统的位置通过释放压力制动器 (POB) 来设置。使用 VDHM 驱动的 PCU 可实现平稳的启动和定位序列。此外,它还可以对高升力系统进行稳定的位置控制。(1)、(2)
手册 - 服务箱 - 雪铁龙
驾驶建议 118 使用钥匙启动 / 关闭发动机 120 使用无钥匙进入和启动功能启动 / 关闭发动机 122 驻车制动器 125 5 速手动变速箱 125 自动变速箱 (EAT6) 126 换档指示灯 129 上坡起步辅助 130 停止和启动 131 识别速度限制和建议标志 133 限速器 137 巡航控制 139 碰撞风险警报和主动安全制动 142 疲劳检测系统 145 车道偏离警告系统 147 盲点监控系统 148 停车传感器 150 倒车摄像头 152 轮胎充气不足检测 153 CITROËN ConnectedCAM™ 155
X射线检查汽车制造中的电子设备
汽车正在变得非常复杂和连接的机器,迅速发展成为智能的自动驾驶汽车。它是高级的,基于技术的创新,可大大提高汽车功能,实现自我诊断,改善驾驶员体验并提供电动和近自动驾驶功能。如今,与仅在“引擎盖下”相比,汽车性能在提供舒适,实时的驾驶员互动和增强安全性的特征上排名较多。具有Wi-Fi,蓝牙,语音控制,加热转向轮,按摩座椅,盲点意识,反碰撞(汽车和行人)警告,360度摄像头,自我贴花,自动制动器,甚至半自主驱动器在新自动摩托车排名中迅速变得更加重要的因素。

使用基于物理的电池模型模拟电动车电池降解⋆
在这里,推动力(F PR)是一个可控的组件,它源自通过电动机或制动器的传输系统。重力(F G)可能会导致加速或减速,具体取决于道路倾斜度;它的行为由(3)描述,其中g是重力加速度,θ是道路的角度。阻力和滚动电阻(分别为F阻力和F RR)是电阻力,始终作用于速度方向。阻力是由空气阻力引起的;它是通过(4)描述的,其中ρ是空气密度,A是车辆的额叶区域,C D是空气阻力系数。滚动阻力是由轮胎和道路之间的轮胎变形和摩擦引起的。它由(5)描述,其中c r是滚动电阻系数(Oliveira等,2023; Alcantara,2022)。f g = k m mg·sin(θ)(3)f drag = 1
机器人夹爪自锁欠驱动机构
摘要 — 我们描述了一种新型机电一体化机器人夹持器的设计概念和第一个原型,该夹持器旨在安装在人形机器人上,以实现牢固(即锁定)和稳健的抓握。这种抓握可以理想地支持复杂的多接触运动,例如爬梯子或操纵复杂工具,同时具有节能效果。为此,我们提出了一种解决方案,即设计一种智能自锁欠驱动机构,该机构与执行器并联安装,当实现所需的抓握时自动触发。该设计通过差速齿轮利用夹持器和制动器之间的可调功率分配。我们的夹持器具有自适应、牢固抓握和节能功能的优势,并通过原型夹持器进行了实验。