机构名称:
¥ 1.0
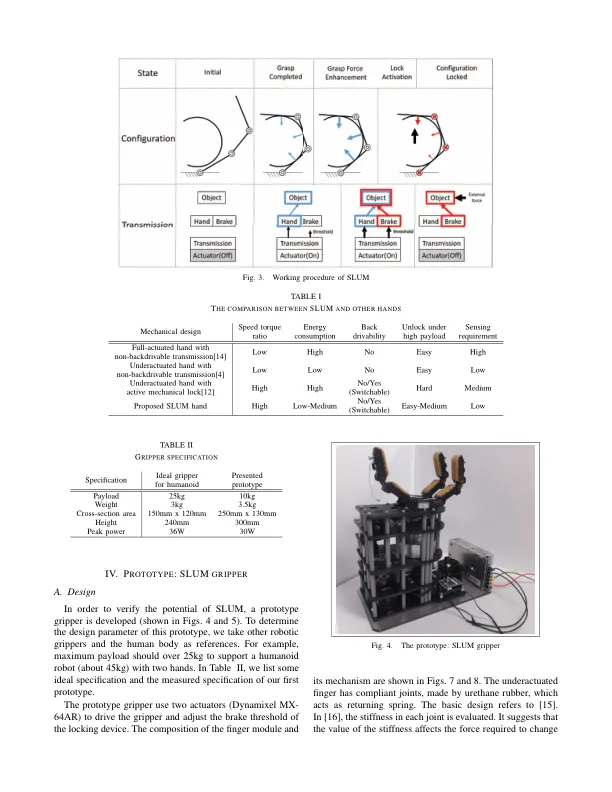
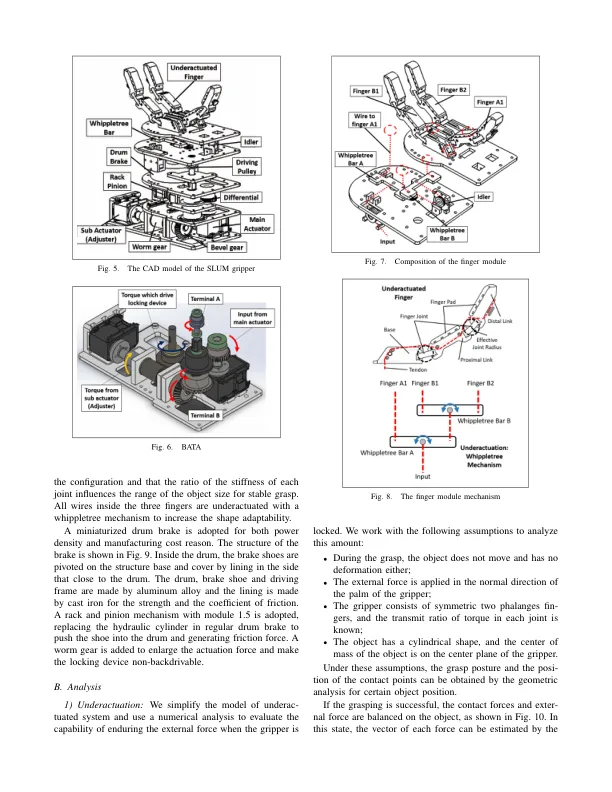
摘要 — 我们描述了一种新型机电一体化机器人夹持器的设计概念和第一个原型,该夹持器旨在安装在人形机器人上,以实现牢固(即锁定)和稳健的抓握。这种抓握可以理想地支持复杂的多接触运动,例如爬梯子或操纵复杂工具,同时具有节能效果。为此,我们提出了一种解决方案,即设计一种智能自锁欠驱动机构,该机构与执行器并联安装,当实现所需的抓握时自动触发。该设计通过差速齿轮利用夹持器和制动器之间的可调功率分配。我们的夹持器具有自适应、牢固抓握和节能功能的优势,并通过原型夹持器进行了实验。
机器人夹爪自锁欠驱动机构
主要关键词



相关文件推荐