XiaoMi-AI文件搜索系统
World File Search System加速度

外部评估报告“抗冲击飞机相关技术”-防卫省/自卫队
・ 关于加加速度(注 2) ・ 关于使用简单模型进行研究的重要性 ・ 关于分析工具的预测值与实验值之间的差异 ・ 关于施加到人体的加速度的评估 ・ 的条件研究目标(垂直载荷)
自动轮椅
arpita2003chatur@gmail.com, shivaibhonge85@gmail.com, gddalvi09@gmail.com 摘要:本文主要介绍我们的革命性发明:轮椅可以使用加速度传感器和头部运动来驱动,并可以避开障碍物。我们的自动轮椅项目基本上基于加速度原理,一个加速度传感器提供两个轴,加速度传感器的输出根据施加在其上的加速度而变化,通过应用简单的公式,我们可以计算倾斜量,倾斜的输出将决定向哪个方向移动。椅子上将安装雨量传感器。雨量传感器模块是一种简单的雨量检测工具。当雨滴落入雨板时,它可以用作开关,也可用于测量降雨强度。我们正在尝试制造一辆受控轮椅;该系统将理解并服从自然语言运动命令,例如“右转”。开发这样的系统使用了各种技术。关键词:革命性,轮椅,雨量传感器,方向和移动,温度传感器
travolta:GPU加速度和算法改进,用于在光兴奋的系统中构建量子最佳控制场
我们提出了一个开源软件包Travolta(用于加速,验证和优化大的时间依赖性算法的曲目),用于对GPU进行大规模平行的量子最佳控制计算。Travolta软件包是对我们以前的NIC-CAGE算法的重要大修,还包括对梯度上升程序的算法改进,以实现更快的收敛速度。我们检查了GPU并行化的三种不同变体,以评估它们在构建各种量子系统中构建最佳控制场的性能。此外,我们还提供了几个示例,这些示例具有GPU增强的Travolta代码的广泛基准,以表明它与以前基于CPU的算法相同的结果,但加速速度快十倍以上。我们的GPU增强功能和算法改进实现了大型量子最佳控制计算,可以在现代的多核计算硬件上有效地执行。
飞机紧急定位发射器对非
纵向加速度................................................................................ 91 垂直加速度.................................................................................... 91 ELT 跌落测试结果................................................................................ 94 验证测试 2,X 方向................................................................................. 102 验证测试 2,Y 方向................................................................................. 102 验证测试 2,Z 方向................................................................................. 103 验证测试 3,X 方向................................................................................. 103 验证测试 3,Y 方向................................................................................. 104 验证测试 3,Z 方向................................................................................. 104 验证测试 4,X 方向................................................................................. 105 验证测试 4,Y 方向................................................................................. 105 验证测试 4,Z 方向................................................................................. 106 垂直加速度结果:CDR 与 Endevco 加速度计............................................ 118 横向加速度结果:CDR 与 Endevco加速度计 .................. 118 FAA 降落塔和 ATR42-300 .............................................................. 120 尾翼

使用大小写字母在此输入您的标题
本文回顾了减少小型航天器内部环境微加速度的方法,并对微加速度水平进行了定量估计。这些方法包括减少航天器整个内部环境的微加速度或使用隔振装置创建保护区。在后一种情况下,重力敏感过程只能在此区域内进行。考虑了基于各种工作原理的各种隔振装置。这些防振装置已在各种航天器上的太空飞行条件下进行了实验测试。在本研究中,它们被视为制造小型技术航天器的现成解决方案。开发了一种小型技术航天器设计,并考虑了通过控制微加速度水平来确保重力敏感过程结果质量的问题。结果可用于小型技术航天器的设计和操作。关键词:重力敏感过程;内部环境;微加速度;工作原理;小型航天器。________________________________________________________________________________________________ 1. 简介

钟摆运动 - 课堂笔记
• 净力(F net )产生加速度(a),加速度需要净力。• F net 和 a 矢量的方向相同。• 由于物体沿圆形路径移动,因此存在向心 a 和 F net。• 由于物体在运动过程中不断加速和减速,因此存在切向 a 和 F net
自动移动机器人的稳定跟踪控制方法
本文提出了针对非BOLONOMIC车辆的稳定跟踪控制规则。通过使用Liapunov函数来证明该规则的稳定性。对车辆的输入是参考姿势(x,y ,, 8)'和参考速度(v,ar)'。本文的主要目的是提出一个控制规则,以找到合理的目标线性和旋转速度(v,a)'。线性化系统的微分方程对于确定对小干扰的关键倾倒参数很有用。为了避免任何滑倒,引入了速度/加速度限制方案。有或没有速度/加速度限制器的几个合理结果。本文提出的控制规则和限制方法是与机器人无关的,因此可以应用于具有死亡算力能力的各种移动机器人。此方法是在自动移动机器人Yamabico-11上实现的。获得的实验结果接近速度/加速度限制器的结果。

分离机动和阵风的方法评估...
代顿大学正在支持联邦航空管理局 (FAA) 对美国商用运输飞机机队结构完整性要求的研究。这项研究的主要目标是通过开发新的和改进的方法和标准来处理和呈现大型商用运输飞机飞行和地面载荷使用数据,从而支持 FAA 机载数据监测系统计划。飞行中记录的加速度是由飞行员发起的机动输入和大气湍流引起的。为了从记录的飞行载荷数据中确定阵风和机动载荷因子谱,必须将阵风和机动载荷因子分开。已经使用了各种方法将飞行员机动和湍流引起的加速度与测量的加速度时间历史分开。本报告介绍了一项研究的结果,该研究旨在评估三种不同方法的有效性和操作处理效率,这些方法用于从配备光学快速存取记录器 (OQAR) 的商用飞机获得的测量加速度数据中分离机动和阵风。还提供了使用机动-阵风分离方法的结论和建议。

建立可靠性和有效性的证据以使用...
头盔是冰球运动中使用的主要头部保护形式。然而,脑震荡仍然对冰球运动员构成重大健康威胁。虽然研究人员已经使用气动冲击器来模拟导致脑震荡的冰上头部撞击损伤机制,但需要使用这些冲击器的加速度测量的可靠性和有效性证据来准确模拟头部撞击损伤。本研究的目的是为使用新型气动头盔水平冲击系统测量线性加速度提供可靠性和有效性证据。结果提供了使用新型冲击器测量施加到头模上的线性加速度时的可靠性(ICC=.787-.875,p < .0001)和并发相关有效性(ICC=.852-.949,p < .0001)证据。这些结果表明新型冲击器符合头盔测试标准。
5 惯性导航系统 (INS) - Nordian
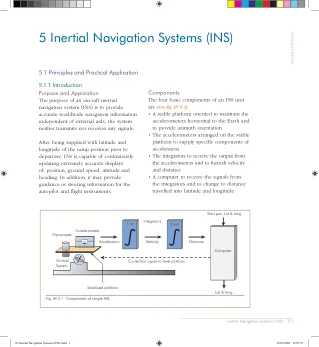
INS - 工作原理 INS 平台上的加速度计测量车辆在南北和东西平面的加速度。加速度信息随后在计算机中被积分两次,并与定时信号进行比较,以产生两个通道(南北和东西)的距离。平台通过陀螺仪稳定的万向系统和平台控制单元保持水平并与真北对齐。飞机轴和 INS 平台轴的相对位置提供有关飞机俯仰、滚转和航向的信息。