机构名称:
¥ 1.0
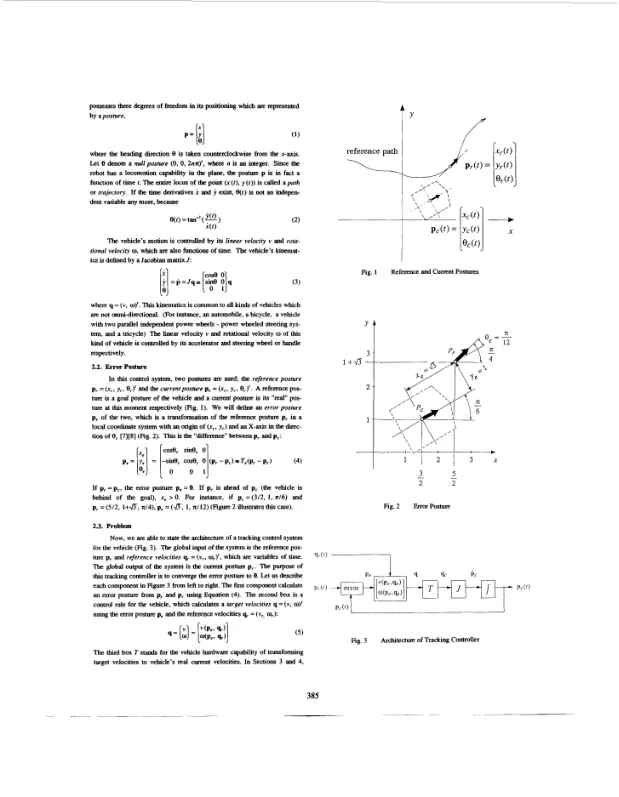
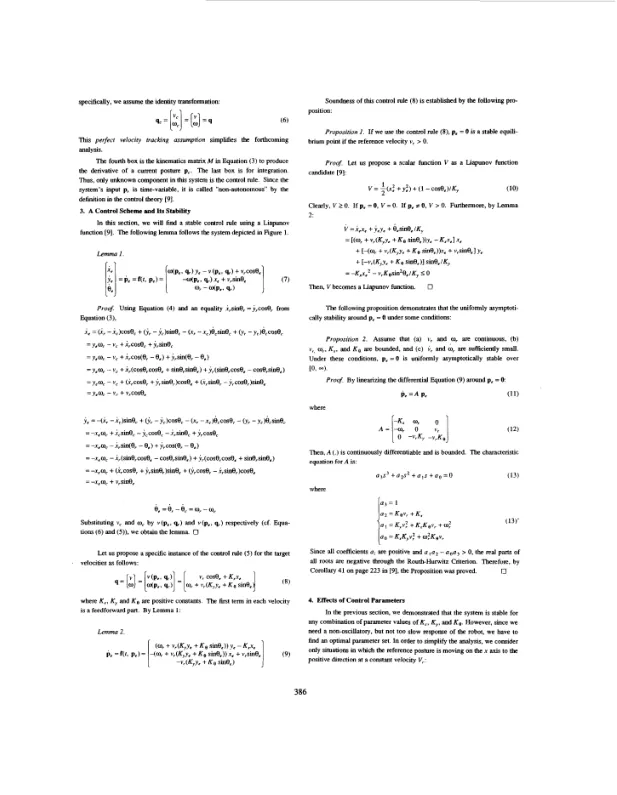
本文提出了针对非BOLONOMIC车辆的稳定跟踪控制规则。通过使用Liapunov函数来证明该规则的稳定性。对车辆的输入是参考姿势(x,y ,, 8)'和参考速度(v,ar)'。本文的主要目的是提出一个控制规则,以找到合理的目标线性和旋转速度(v,a)'。线性化系统的微分方程对于确定对小干扰的关键倾倒参数很有用。为了避免任何滑倒,引入了速度/加速度限制方案。有或没有速度/加速度限制器的几个合理结果。本文提出的控制规则和限制方法是与机器人无关的,因此可以应用于具有死亡算力能力的各种移动机器人。此方法是在自动移动机器人Yamabico-11上实现的。获得的实验结果接近速度/加速度限制器的结果。
自动移动机器人的稳定跟踪控制方法
主要关键词


相关文件推荐