机构名称:
¥ 1.0
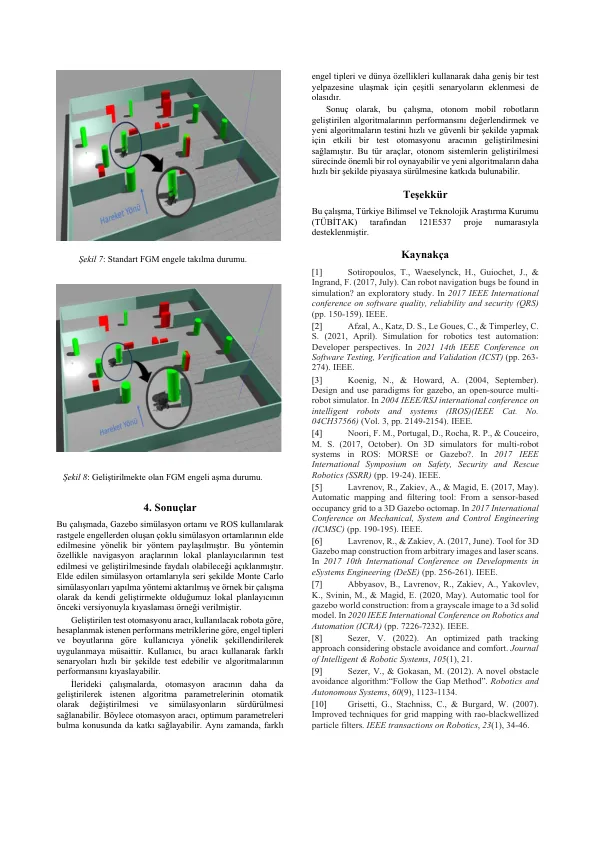
在这项研究中,开发了一种模拟测试自动化工具,以衡量自动移动机器人,尤其是本地规划人员的性能。车辆允许在3维的凉亭模拟环境中创建不在环境图上的意外障碍,该环境的物理电动机可以一一以所需的尺寸和随机位置模仿现实世界,然后将需要新的环境数量的新环境数量。最后,在每个环境中创建的每个多余环境中,它在每个环境中运行模拟,以测试它是否可以克服障碍物从起点到终点,直到到达终点并在记录文件中运行其成功指标。使用不同的本地规划人员重复相同的模拟时,获得了必要的数据以比较性能指标。测试自动化工具而开发的本地规划算法算法的优缺点,并且我们的发展的缺点和缺点已经揭示了我们的改进。
自动移动机器人的凉亭测试自动化车辆
主要关键词


相关文件推荐