XiaoMi-AI文件搜索系统
World File Search System动作的
强化学习条目检查策略...
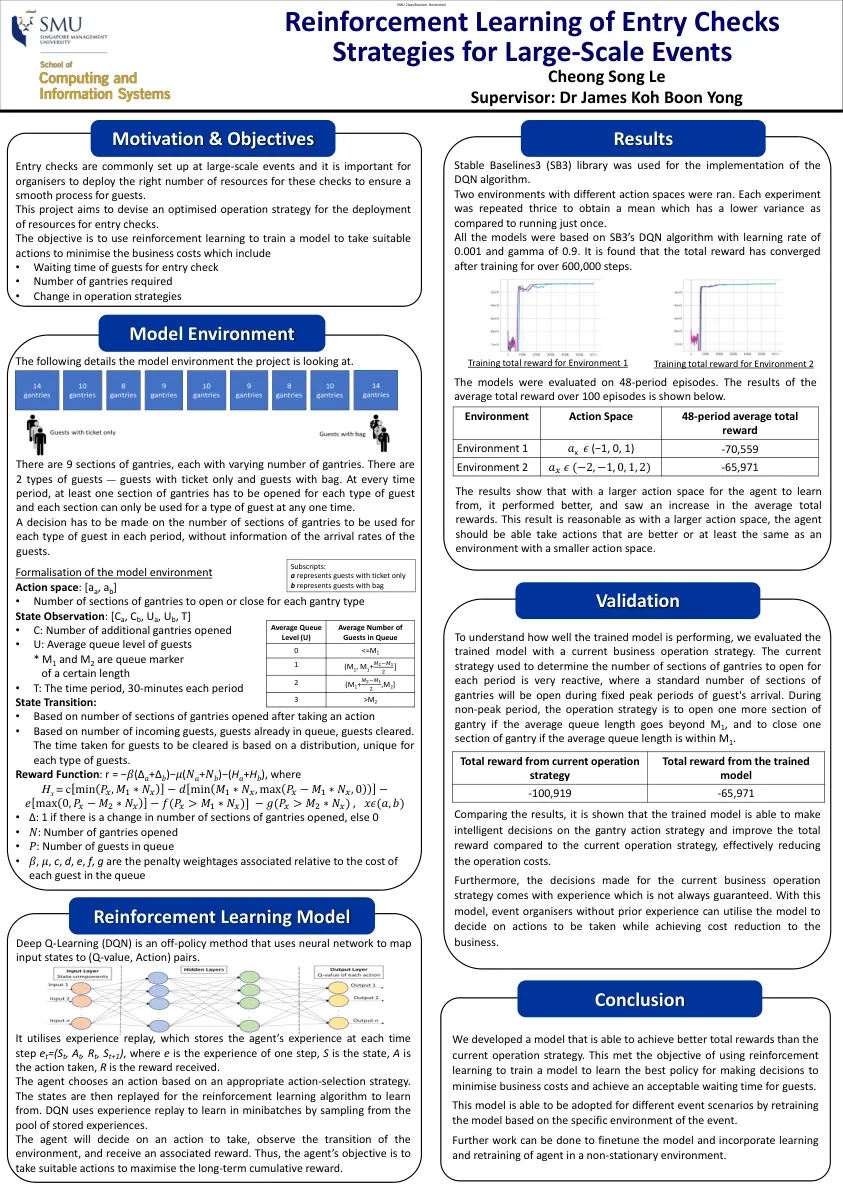
体验重播,在每次步骤e t =(s t,a t,r t,s t+ 1)中存储代理商的经验,其中e是一步的经验,s是状态,a是所采取的动作,r是收到的奖励。代理商选择基于适当动作的操作-SelectionsTrategy。随后重播各州,以学习算法的增强算法。dqn使用经验重播,通过从存储的体验池中抽样在Minibatches中学习。代理商将决定采取行动,观察环境的过渡并获得相关的奖励。因此,代理的目标是采取适当的动作,以最大程度地提高长期的termumulativereward。奖励。recults

全体发言人3:副教授IR。 Norrima Mokhtar博士(...
摘要:本届会议探讨了人类设备界面技术的进步,重点关注诸如手势控制,大脑计算机接口,通过EOG进行的眼睛运动,通过相机移动的眼睛运动以及更多轻松的输入以实现用户体验和动作的新兴趋势。人工智能技术,无论是监督,半监督和自主,在处理分类类别的输入中起着主要作用,以进行行动和数据监视。潜在的应用包括自动化,医疗保健,教育,娱乐和日益流行的游戏行业。这些技术正在重新定义人类设备的协作并显着增强用户体验。

自然对企业和政府的积极意义
完整的昆明 - 蒙特利尔全球生物多样性框架的结果目标和23个面向动作的目标。至关重要的是,GBF的目标和目标被视为不可分割的整体,并迅速,全面地实施。21取得成功,澳大利亚政府与州和领土政府的合作至关重要,以实现GBF的目标和目标。澳大利亚的每个管辖区都应考虑如何衡量针对GBF目标的进度,包括将在哪些程度上衡量哪些生物多样性的要素,并通过哪些资金以及什么资金来衡量。应制定政府间协议,概述澳大利亚政府以及州和领土政府在全球生物多样性框架中实现所有目标的责任。
交易策略
在大西洋弧中与Cortaderia selloana作战的跨国策略在生命的框架中,在生命中,Cortaderia项目的框架是与Cortaderia打击Cortaderia的跨国策略是该项目的一部分:“生命停止Cortaderia-紧急措施,用于控制Pampas Grass(Cortaderia selloana selloana selloana selloana selloana)的范围。计划对抗新的结肠并控制已经建立的殖民地,并特别注意沿海保护自然区域。具体来说,生活项目旨在建立与葡萄牙,西班牙和法国大西洋弧线沿线与Cortaderia Selloana作斗争的基础,特别是在Cantabria自治社区工作。动作的重点是以下:

版权与人工智能,第 1 部分:数字复制品
1 就版权局的《版权与人工智能报告》而言,“AI”或“人工智能”是旨在执行通常与人类智能或认知功能相关的任务的自动化系统的一般分类。《人工智能研究:调查通知》,88 Fed. Reg. 59942, 59948 (2023 年 8 月 30 日)(“NOI”)。另请参阅《2019 财政年度约翰·S·麦凯恩国防授权法案》,Pub. L. 115–232,§ 238(g)(2),132 Stat. 1636, 1697–98 (2018)(将“人工智能”定义为包括“在计算机软件、物理硬件或其他环境中开发的系统,用于解决需要类似人类的感知、认知、规划、学习、交流或身体动作的任务”)。

人工智能 NEW 学习计划
› 知识表示、机器推理、规划、机器学习、人类语言处理和技术、人机交互 › 工业和服务机器人、在复杂和非复杂环境中感知、决策和执行机器人动作的先进技术在现有机器人平台上结构化、优化和实施基于人工智能的软件解决方案 › 语音、图像和视频信号的获取、处理和解释、计算机视觉和应用 › 认知神经科学、认知和大脑结构及其在人工智能模型中的应用 › 原则、法律以及人工智能系统的设计和应用的道德、法律及其应用 › 商业和经济流程,用于基于人工智能系统的产品和服务的组织、管理和创新
777 555 LLL EEE TTT - IPU RAN
必须处理各种对象的管理 - 技术、物理、组织、社会经济、生物等,以及跨学科性质的对象。人类的历史就是管理实践的胜利和失败的故事——失败是由于无法解决相关的管理问题或未能使用现有的手段来解决这些问题而导致的。这些工具包括对控制对象形成控制动作的方法,这些控制动作将赋予控制对象必要的属性,例如目标状态的可实现性、稳定性、安全性、根据所选质量标准的最优性等。而这一切——是在信息、时间、能源、环境、财力等资源可能短缺的背景下,以及需要考虑影响控制对象和不可控因素的干扰

自主精确组装分段镜面砖,用于
组装大型空间结构意味着将模块化组件有序地组装在一起,这由指示每个部件相对定位的高级总体规划决定。在空间应用中,常见的机器人系统在执行任务方面具有较低的自主性。操作通常依赖于远程命令,这需要为操作员提供适当的反馈渠道,通常会受到相当大的时间延迟的影响。共享自主性的概念提高了此类机器人系统的灵活性,并减少了操作员在复杂任务中的工作量。尽管如此,由于组装任务的精细度,远程操作方法在组装复杂结构时使用有限,因为操作员命令和机械手动作的同步会消耗

基于约束的不完整水平的生成
大多数程序内容生成的研究都可以理解,专注于生成可完整的水平,即播放器可以完成它们的水平。在这项工作中,我们探讨了无法完成的水平及其应用的产生。在基于现有的基于约束的级别的一般级别上构建,我们为从一开始就无法达到目标的目标增加了支持。因此,发电机可以在许多方面(例如本地瓷砖模式)创建与可完成水平相似的级别,但无法完成。然后,我们描述了这些约束的几个应用以及由此产生的级别,包括:定性地表征使级别无法完成的原因;创建培训数据以进行完整分类器;检查生成器只能生成可完整的级别;并生成需要玩家使用特殊动作的水平。
充电界面计划的白皮书E.V(...
威胁模型,例如大步,没有考虑攻击者行动的现实后果。本文试图解决具有威胁情景的动作的缺失后果。威胁情景是一个简短的叙述,描述了演员的行为,被剥削的脆弱性和结果。使用上一个示例,威胁情况可能是:“未发现的攻击者闯入用户帐户的尝试允许攻击者最终访问用户帐户,这允许攻击者在授权用户的幌子下执行额外的恶意活动”(Kohnfelder&Garg,1999年),在其中效果或对组织的影响,该组织的效果是对组织的影响。生态系统。在大步示例中没有斜体文本,因为大步没有考虑由于被剥削的漏洞而考虑的后果。