XiaoMi-AI文件搜索系统
World File Search System动态运动

HeartJnl-2022-BSCMR 1..26
sheetlet(绝对E2A)。e2a的迁移率定义为舒张和末端螺旋杆之间的绝对E2a的差异。导致紧凑的RV,心肌细胞取向在圆周范围内,整个心室的逐渐变化。在小梁中,RV心肌细胞的方向主要是纵向。图1。在志愿者和患者中也看到了类似的模式。在所有参与者中,RV无室壁和隔膜中的绝对E2a从二骨上增加到末端的螺旋杆,表明动态的微观结构重新安排。与正常的RV相比,SRV表现出相似的E2A迁移率(26.1±10.8°Vs 26.4±9.2°)。与正常心脏(21.1±14.9°vs 48.1±10.2°; p <0.001)相比,E2A的迁移率降低了,讨论动态微结构重新额度是功能性RV平板的建议。与正常心脏相比,我们证明了SRV隔膜中的E2A迁移率降低,这表明这些患者中间隔微观结构的动态运动受损。结论,我们已经证明了人RV内的心肌细胞的排列,在正常心脏和右心室功能障碍的极端模型中。这为RV疾病患者的DT-CMR和临床状况的潜在关联的未来研究打开了大门。感谢Ricardo Wage和Raj K Soundarajan的感谢,他们为CMR研究提供了支持。
可伸展的液体金属E-Skin,用于软机器人的本体感受振动
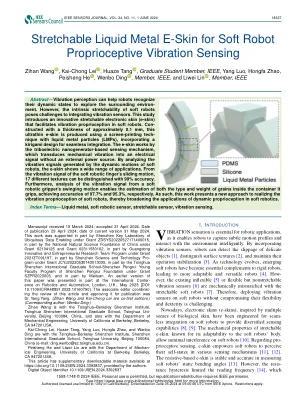
摘要 - 振动感知可以帮助机器人识别其动态状态以探索周围环境。但是,软机器人的内在可拉伸性为整合振动传感器带来了挑战。这项研究引入了一种创新的可拉伸电子皮肤(E-SKIN),可促进软机器人中的振动本体感受。以大约0.1 mm的厚度结构,该超薄e-Skin是使用带有液态金属颗粒(LMP)的屏幕打印技术生产的,并结合了Kirigami设计以进行无缝集成。基于Triboelectric纳米生成器的感应机制的E-Skin作用,该机制将机械振动转导为没有外部电源的电信号。通过分析由软机器人的动态运动产生的振动信号,E-Skin显示了广泛的应用。从软机器人手指的滑动运动的振动信号中,可以以99%的精度区分17种不同的纹理。此外,对软机器人抓手的摇摆运动的振动信号的分析可以估算其抓地的容器内部晶粒的类型和重量,分别达到97.7%和95.3%的精确度。因此,这项工作提出了一种实现软机器人振动本体感受的新方法,从而扩大了动态本体感受在软机器人技术中的应用。

基于 DMP 的受扰场景下机器人与人类之间的反应式交接
摘要 交接看似简单,但需要双方共同协调,这通常在动态协作场景中发生。实际上,人类能够适应并响应其伙伴的运动,以确保在受到干扰或中断的情况下无缝交互。然而,关于机器人交接的文献通常考虑的是简单的场景。我们提出了一种基于动态运动原语的在线轨迹生成方法,以实现机器人在受干扰场景中的反应性行为。因此,机器人能够适应人类的运动(如果交接中断,机器人会停止,同时在伙伴轨迹受到轻微干扰的情况下继续前进)。进行定性分析,以证明所提出的控制器在不同参数设置和非反应性实现下的能力。该分析表明,具有反应性参数设置的控制器产生的机器人轨迹在受到干扰的情况下可以被视为更加协调。此外,我们还对参与者进行了一项随机试验,以验证该方法,方法是通过问卷调查评估受试者的感知,同时测量任务完成情况和机器人空闲时间。事实证明,我们的方法可以显著提高交互的主观感知,并且在分析的两组参数之一下,任务性能指标没有出现统计上显着的下降。本文代表了在交接任务中引入明确考虑扰动和中断的反应控制器的第一步。
用于多功能,动态和鲁棒的双体运动控制
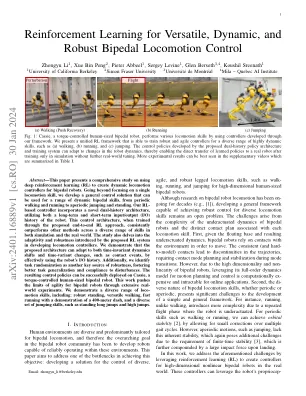
摘要 - 本文介绍了一项有关使用深钢筋学习(RL)为双皮亚机器人创建动态运动控制器的综合研究。超越了关注单个运动技能的关注,我们开发了一种通用控制解决方案,该解决方案可用于一系列动态的两足动物技能,从定期步行和跑步到Aperiodic的跳跃和站立。我们的基于RL的控制器结合了一种新颖的双历史结构,利用了机器人的长期和短期输入/输出(I/O)历史记录。通过拟议的端到端RL方法进行培训时,这种控制架构始终优于模拟和现实世界中各种技能的其他方法。该研究还深入研究了拟议的RL系统在开发运动控制器时引入的适应性和鲁棒性。我们证明,提出的体系结构可以通过有效使用机器人的I/O历史记录来适应时间不变的动态变化和时间变化的变化,例如接触事件。此外,我们将任务随机化确定为鲁棒性的另一个关键来源,促进了更好的任务概括和对干扰的依从性。可以成功部署所得控制的控制策略,这是一种扭矩控制的人尺寸的两头机器人。这项工作通过广泛的现实世界实验推动了双皮亚机器人的敏捷性限制。我们展示了各种各样的运动技能,包括:坚固的站立,多功能步行,快速跑步,展示了400米仪表板,以及各种各样的跳跃技能,例如站立的跳远和跳高。

Nasseri,A.,D。G. Lloyd,A。L. Bryant,J。Headrick,T。A. Sayer和D. J. Saxby。动态Moto 期间前交叉韧带的机理Nasseri,A.,D。G. Lloyd,A。L. Bryant,J。Headrick,T。A. Sayer和D. J. Saxby。动态Moto
Nasseri,A.,D。G. Lloyd,A。L. Bryant,J。Headrick,T。A. Sayer和D. J. Saxby。 动态运动任务期间前交叉韧带负荷的机制。 Med。 SCI。 运动练习。 ,卷。 53,编号 6,pp。 1235 - 1244,2021。 简介:本研究确定了使用经过验证的计算模型在标准化的降落地面跳跃任务中,在标准化的落水式跳跃任务中确定了前交叉韧带(ACL)力及其贡献者。 方法:在健康的娱乐活动女性执行的动态任务中,收集了八个跨膝盖肌肉的三维全身运动学,地面反应力和肌肉激活模式(n = 24)。 这些数据用于合并的神经肌肉骨骼和ACL力模型,以确定下肢肌肉和ACL力。 结果:在下降地面上下跳跃期间,ACL力量(2.3±0.5体重)在约14%处观察到。 ACL力主要通过矢状平面产生,肌肉是ACL载荷的主要来源。 主要的ACL拮抗剂(即装载机)是胃内部和股四头肌,而腿筋是主要的ACL激动剂(即支持者)。 结论:结合神经肌肉骨骼和ACL力模型,在充满挑战的运动任务中确定了肌肉在ACL负载和支撑中的作用。 结果强调了ACL载荷中胃肠痛的重要性,在预防ACL损伤和康复过程中,这可以被认为更为突出。Nasseri,A.,D。G. Lloyd,A。L. Bryant,J。Headrick,T。A. Sayer和D. J. Saxby。动态运动任务期间前交叉韧带负荷的机制。Med。SCI。 运动练习。 ,卷。 53,编号 6,pp。 1235 - 1244,2021。 简介:本研究确定了使用经过验证的计算模型在标准化的降落地面跳跃任务中,在标准化的落水式跳跃任务中确定了前交叉韧带(ACL)力及其贡献者。 方法:在健康的娱乐活动女性执行的动态任务中,收集了八个跨膝盖肌肉的三维全身运动学,地面反应力和肌肉激活模式(n = 24)。 这些数据用于合并的神经肌肉骨骼和ACL力模型,以确定下肢肌肉和ACL力。 结果:在下降地面上下跳跃期间,ACL力量(2.3±0.5体重)在约14%处观察到。 ACL力主要通过矢状平面产生,肌肉是ACL载荷的主要来源。 主要的ACL拮抗剂(即装载机)是胃内部和股四头肌,而腿筋是主要的ACL激动剂(即支持者)。 结论:结合神经肌肉骨骼和ACL力模型,在充满挑战的运动任务中确定了肌肉在ACL负载和支撑中的作用。 结果强调了ACL载荷中胃肠痛的重要性,在预防ACL损伤和康复过程中,这可以被认为更为突出。SCI。运动练习。,卷。53,编号6,pp。1235 - 1244,2021。简介:本研究确定了使用经过验证的计算模型在标准化的降落地面跳跃任务中,在标准化的落水式跳跃任务中确定了前交叉韧带(ACL)力及其贡献者。方法:在健康的娱乐活动女性执行的动态任务中,收集了八个跨膝盖肌肉的三维全身运动学,地面反应力和肌肉激活模式(n = 24)。这些数据用于合并的神经肌肉骨骼和ACL力模型,以确定下肢肌肉和ACL力。结果:在下降地面上下跳跃期间,ACL力量(2.3±0.5体重)在约14%处观察到。ACL力主要通过矢状平面产生,肌肉是ACL载荷的主要来源。主要的ACL拮抗剂(即装载机)是胃内部和股四头肌,而腿筋是主要的ACL激动剂(即支持者)。结论:结合神经肌肉骨骼和ACL力模型,在充满挑战的运动任务中确定了肌肉在ACL负载和支撑中的作用。结果强调了ACL载荷中胃肠痛的重要性,在预防ACL损伤和康复过程中,这可以被认为更为突出。关键词:前交叉韧带负荷,运动损伤,肌肉骨骼建模,计算模型R

针对2型糖尿病和膝关节骨关节炎患者的有氧训练的不同强度:一项随机对照试验
多种疾病是一个不断上升的公共卫生挑战,对健康管理和政策产生了重要影响。最常见的多发性模式是心脏代谢和整骨疾病的结合,这是2型糖尿病(T2DM)和骨关节炎的高度普遍共发生所证明的。T2DM与膝关节骨关节炎(KOA)之间的关系引起了人们的关注,因为重叠的患病率和共同的危险因素(例如肥胖症和高级衰老)。研究表明T2DM和KOA之间存在显着关联。一项包括1型DM(T1DM)和T2DM种群的研究观察到KOA与T2DM的关联显着更高,与没有T2DM相比,患有T2DM的个体具有T2DM的个体的可能性比值比(OR)两倍多。有趣的是,这种关联在非肥胖个体中更强,强调了糖尿病的潜在影响超出了肥胖的影响(2)。还有其他研究共同强调了T2DM和KOA之间的显着相关性,这表明将这些条件联系起来的机制超出了肥胖症(3,4)的简单风险因素。锻炼被认为是T2DM治疗的基石,以及饮食和可靠的效率药物(5,6)。尽管锻炼在改善血糖控制,血脂纤维纤维和该组的其他结果方面的有效性已得到充分证明(7-9),但对不同类型运动的相对影响的确定性较小。针对KOA的人,有氧运动传统上是研究最多的运动(8),并招募了大量的肌肉,包括步行,骑自行车,游泳和慢跑。对于KOA,文献中发现的最常见的有氧土地运动的锻炼是固定自行车(10),因为它是一种低体重轴承和非影响力的体育活动形式。已经表明,固定的骑自行车在10到12周内进行的固定循环导致膝盖疼痛和僵硬的减轻,并提高了KOA患者的步行速度和距离(11,12)。由骑自行车引起的康复的积极受益可能归因于腿部肌肉功率输出和动态运动范围的改善(13)。

接头的设计、静态结构分析和寿命估计...
1.简介 飞机是一种通过从空中获得推力而飞行的飞行器。它通过机翼的静态升力或动态升力,或者有时是飞机发动机的向下推力来抵消重力。围绕飞机的人体运动称为飞行。民用飞机由飞行员驾驶,但无人驾驶飞机可以由计算机间接控制或自主控制。飞机可以根据升力类型、飞机推力、用途等不同标准进行分类。较重的飞机(例如飞机)必须设法处理向下推的空气或气体,以便发生反应(根据牛顿运动定律)将飞机向上推。这种在空中的动态运动是“气动”一词的来源。有两种方法可以控制产生的快速上升力,即流线型升力和发动机推力。飞机的设计考虑了许多因素,例如客户和制造商的要求、安全协议、物理和财务要求。对于某些飞机型号,设计过程由国家适航机构控制。飞机的主要部件通常分为三类: 1.结构包括主要承重部件和耦合设备。2.动力系统包括动力源和相关设备。3.飞行包括控制、导航和通信系统,通常是电气性质的。1.1 飞机结构 飞机由五个主要辅助部分组成,即:1.机身:机身是机身的基本结构,其他所有部分都连接在其上。机身包括驾驶舱或飞行甲板、旅客舱和货舱。2.机翼:机翼是飞机最基本的升力输送部件。机翼的布置根据飞机类型及其刺激而变化。大多数飞机的设计使得机翼的外端比机翼与机身连接的地方高。3.尾翼(尾部结构):尾翼或尾部提供飞机的安全性和控制力。4.动力装置(推进系统):飞机动力装置分为五种类型。5.纵梁与壳体或肋骨可靠地关联。涡轮螺旋桨发动机用于较低速度,冲压喷气发动机用于高速飞机,涡扇发动机用于0.3马赫至2马赫,涡轮喷气发动机用于高速飞机,以及基本低速飞机的发动机。起落架:飞机的起落架将飞机支撑在地面上,平稳飞行,保持飞行和着陆的平稳。 1.2 纵梁和接头 在飞机机身中,纵梁连接到成型器(也称为机匣)并沿着飞机的纵向方向运行。它们主要负责将蒙皮上的流线型重量传递到边框和成型器中。在机翼或稳定器中,纵梁横向运行并连接在肋骨之间。这里的主要功能还包括将机翼上的扭转力转移到肋骨上并进行战斗。有时会使用“纵梁”和“纵梁”这两个词。纵梁通常比纵梁承受更大的重量,并且将蒙皮重量转移到内部结构上。纵梁通常是

心脏谷煤矿中的金丝雀。假体瓣关闭期间的流速和推断剪切 - 血液损伤和凝结的预测
抽象目的:证明在瓣膜闭合期间预测的血剪力与血栓形成性之间的明确联系,这解释了组织和机械阀之间的血栓形成差异,并提供了一种实用的度量,以开发和完善假体瓣膜设计,以降低血栓形成性。方法:使用脉冲和准稳态流系统进行测试。使用校准预测的参考孔口区域的模拟光电电子学测量了预计开放阀区域(POVA)的时间变化。在心脏周期上确定的流速度等于瞬时体积流速除以POVA。对于闭合阀间隔,获得了准稳态的背压/流动测试的数据。性能通过得出的最大负和正闭合流速度排名,通过推断的速度梯度(剪切)证明潜在的临床血栓形成性。测试了临床,原型和对照阀。结果:多个测试数据集的血液剪切和凝块潜力指导经验优化和阀设计的比较。评估了用于软闭合和减少血栓形成电位的3-D打印原型阀设计(BV3D)。结论:在瓣膜闭合处的传单几何形状,流速和预测的剪切之间的关系,照亮了假体瓣膜血栓形成的重要来源。对这种关系表示赞赏,并基于我们的实验产生了比较数据,我们实现了瓣膜原型的优化,具有降低的血栓形成性。竞争利益:没有声明。财务披露:这项研究都是所有作者都在无偿的基础上进行的。关键词:假肢;实验室模拟;预计的开放阀区;瓣膜闭合,血栓形成;阀流速;反弹中央消息是阀门关闭流速的衍生实验室指标,提供了一种对阀门模型进行潜在血液损伤的方法。这些结果为先前的临床观察提供了新的见解和机理解释,在该观察中,主动脉和二尖瓣替代物的替代方案的血栓形成潜力和抗凝需求有所不同。这项研究提出了设计和评估新型机械阀模型的前进道路,以进行未来的开发。作为对机械和生物假体瓣膜的多次修改尚未解决与血栓形成和耐用性有关的慢性缺点,因此需要一个新的开发途径,以消除前者的血栓形成,并在后者中延长耐用性。透视假肢机械阀装置会导致血细胞损害。激活凝血级联反应是通过动态阀函数引发的。设计以关注阀门行为为重点的创新可能会降低瓣膜血栓形成潜力。我们的研究表明,阀门设计可以在经验上优化,重点是该阶段。对开放气门性能的重要性重点鼓励了长期存在的偏见,而对识别潜在血栓形成并发症至关重要的闭合相位持续存在。我们的多个数据集可用于挑战这种偏见。本研究比较了三个临床瓣膜和两个实验原型。机械阀的动态运动和衍生的区域流速受到阀几何形状的影响。关注瓣膜闭合动力学可能导致潜在的血栓形成原型阀的发展。实验室实验支持阀区域流速与瓣膜血栓形成潜力有关的假设。