机构名称:
¥ 1.0
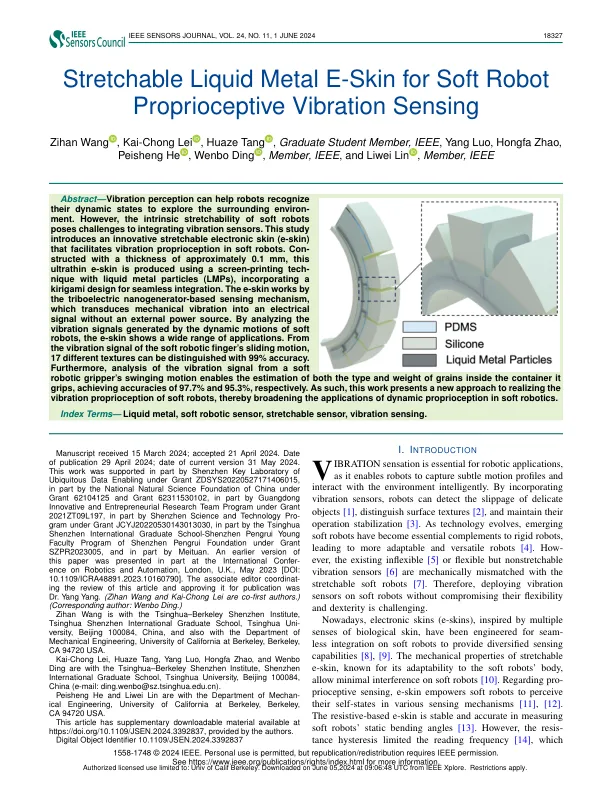
摘要 - 振动感知可以帮助机器人识别其动态状态以探索周围环境。但是,软机器人的内在可拉伸性为整合振动传感器带来了挑战。这项研究引入了一种创新的可拉伸电子皮肤(E-SKIN),可促进软机器人中的振动本体感受。以大约0.1 mm的厚度结构,该超薄e-Skin是使用带有液态金属颗粒(LMP)的屏幕打印技术生产的,并结合了Kirigami设计以进行无缝集成。基于Triboelectric纳米生成器的感应机制的E-Skin作用,该机制将机械振动转导为没有外部电源的电信号。通过分析由软机器人的动态运动产生的振动信号,E-Skin显示了广泛的应用。从软机器人手指的滑动运动的振动信号中,可以以99%的精度区分17种不同的纹理。此外,对软机器人抓手的摇摆运动的振动信号的分析可以估算其抓地的容器内部晶粒的类型和重量,分别达到97.7%和95.3%的精确度。因此,这项工作提出了一种实现软机器人振动本体感受的新方法,从而扩大了动态本体感受在软机器人技术中的应用。
可伸展的液体金属E-Skin,用于软机器人的本体感受振动
主要关键词
相关文件推荐