XiaoMi-AI文件搜索系统
World File Search System包络线

套利与快速频率响应之间的协同作用......
4 包络线是电力系统调节中使用的一个概念,表示为电池充电状态管理提供灵活性的领域。EFR 定义了“宽”和“窄”包络线,每个包络线都与一个单独的产品相关,该产品由 a) 死区和 b) 允许的 9% 的电池标称容量进行充电或放电操作定义。

航空发动机中的风车
4.1 参数配置路线图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 4.5 改变定子阻尼,稳态. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 4.9 转子、定子和触头穿透包络线[mm],γ m = 1.0 .................................. 54 4.10 转子、定子和触头穿透包络线[mm],γ m = 2.5 .................................. 54 4.11 转子力,γ m = 0.5 ........................................................................................................................................ .................................................................................. .................................................................. 55 4.12 转子力,γ m = 1.0 ........................................................................................................................................ .................................................................................. .................................................................. 55 4.13 转子力,γ m = 2 . 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 57
航空发动机中的风车
4.1 参数配置路线图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 4.5 改变定子阻尼,稳态. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 4.9 转子、定子和触头穿透包络线[mm],γ m = 1.0 .................................. 54 4.10 转子、定子和触头穿透包络线[mm],γ m = 2.5 .................................. 54 4.11 转子力,γ m = 0.5 ........................................................................................................................................ .................................................................................. .................................................................. 55 4.12 转子力,γ m = 1.0 ........................................................................................................................................ .................................................................................. .................................................................. 55 4.13 转子力,γ m = 2 . 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 57
航空发动机中的风车
4.1 参数配置路线图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 4.5 改变定子阻尼,稳态. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 4.9 转子、定子和触头穿透包络线[mm],γ m = 1.0 .................................. 54 4.10 转子、定子和触头穿透包络线[mm],γ m = 2.5 .................................. 54 4.11 转子力,γ m = 0.5 ........................................................................................................................................ .................................................................................. .................................................................. 55 4.12 转子力,γ m = 1.0 ........................................................................................................................................ .................................................................................. .................................................................. 55 4.13 转子力,γ m = 2 . 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 57
航空发动机中的风车
4.1 参数配置路线图 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 4.5 改变定子阻尼,稳态. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 4.9 转子、定子和触头穿透包络线[mm],γ m = 1.0 .................................. 54 4.10 转子、定子和触头穿透包络线[mm],γ m = 2.5 .................................. 54 4.11 转子力,γ m = 0.5 ........................................................................................................................................ .................................................................................. .................................................................. 55 4.12 转子力,γ m = 1.0 ........................................................................................................................................ .................................................................................. .................................................................. 55 4.13 转子力,γ m = 2 . 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 57
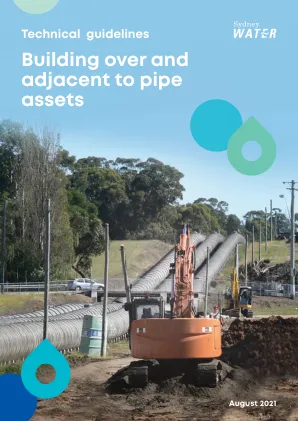
管道资产上方和相邻的建筑物 SW269
外部荷载的影响区 (ZOI) 是一个假想的包络线,在此包络线内,外部垂直荷载会对管道或结构施加应力(图 1、1.1 和 1.2)。该区域由从管道或结构底部投影向上延伸至地面 45° 角的线定义。如果管道目前被混凝土包裹或将被包裹,这些线从包裹层的底部边缘延伸。地面上的垂直荷载在土壤中产生的应力会随着深度的增加而减小。因此,埋得较深的管道通常比较浅的管道受到的影响小。图 18 – 21 考虑了其他影响的 ZOI,例如您的工程开挖和我们管道附近的排水。

01 GRASP 演示清洁空间工业日 2023.pdf
• 为 RAFTI 抓钩装置提供软、硬捕获能力 • 可用于柔性和不柔性航天器结构环境 • 实现 RAFTI 阀芯(OF 开发的任何类型)的接合 • 实现双向流体流动 • 提供 0 级未配对抑制 • 与 RAFTI 配对时提供 2 级落水抑制 • 在“捕获框”内执行软捕获(错位和位移包络线、相对速度包络线) • 执行 RAFTI 和主动阀芯的硬捕获和对准 • MEOP = 300 Bar • 捕获框值:20-100 mm xyz、10 度 xyz、0.01 m/s xyz • 夹紧力 = 1kN • 对接后最大接口负载 = TBC N • 流量 = 0.5 Bar dP,最大 10g/s 水
CIRA 结冰风洞中的云表征 - fedOA
8.1 STS 结冰云特性描述 ......................................................................................................129 8.1.1 液滴大小校准 ..............................................................................................................132 8.1.2 SBS 温度评估 ..............................................................................................................140 8.1.3 结冰云均匀性和覆盖面积 .............................................................................................143 8.1.4 液态水含量测量 .............................................................................................................149 8.1.5 结冰云操作包络线 .............................................................................................................155 8.2 ATS 结冰云特性描述 .............................................................................................................156 8.2.1 液滴大小校准 .............................................................................................................156 8.2.2 SBS 温度评估 .............................................................................................................163 8.2.3 结冰云均匀性和覆盖面积 .............................................................................................164 8.2.4 液态水含量测量 .............................................................................................................170 8.2.5 结冰云8.3 数据比较................................................................................................................177 8.3.1 MVD 数据比较:基本分析....................................................................................177 8.3.1 MVD 数据比较:热力学效应...............................................................................181 8.3.2 MVD 数据比较:流体动力学效应.......................................................................183 8.3.3 SBS 温度包络线比较....................................................................................186 8.3.4 均匀性测量比较....................................................................................................187 8.3.5 LWC 数据比较....................................................................................................191

为 AIAA 期刊准备论文 - TU Delft 存储库
目前正在开发几种可在飞行中部署的变形无人机系统,用于执行各种任务。成功在飞行中部署这些飞机的关键是,它们在潜在的高度动态过渡阶段之后进入稳定且可控的飞行阶段,且不超过结构限制。本研究的目的是开发一种新的基于物理的方法,该方法可用于评估在哪些飞行条件下可以安全部署无人变形飞机,包括稳定性、可控性和动态飞行载荷。该方法基于部署阶段的蒙特卡罗模拟和多体动力学仿真模型。作为测试案例,Dash X UAV 结合不同的部署场景进行分析。要改变的参数是初始飞行条件,例如机身角速率和变形策略。该模型通过部署状态下的一组有限的飞行测试数据进行验证。给出了具有高度动态过渡阶段的安全部署的飞机运动和载荷示例结果。介绍了构建稳定性极限和部署载荷包络线的过程。部署载荷包络线是通常用于结构设计的 V-n 图的自然延伸。稳定性极限可用于确定无人机可以安全部署的操作极限,而不会出现进入不稳定或不可控飞行状态的风险。最终,该方法可用于支持飞行中可部署变形无人机的设计和相关操作程序。事实证明,Dash X 无人机可以在现实条件下以可接受的结构载荷安全部署。