XiaoMi-AI文件搜索系统
World File Search System单车
共享单车自主起飞和降落 ...
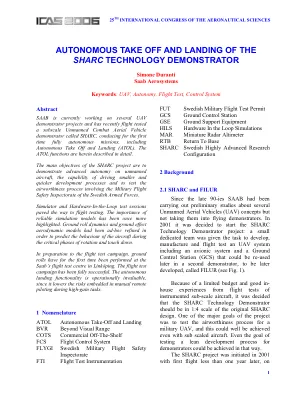
自 20 世纪 90 年代末以来,SAAB 一直在对几种无人驾驶飞行器 (UAV) 概念进行初步研究,但并未将其用于飞行演示。2001 年,决定启动 SHARC 技术演示项目:一个小型专业团队负责开发、制造和飞行测试一个无人机系统,包括航空电子系统和地面控制站 (GCS),该系统稍后可在稍后开发的第二个演示器(称为 FILUR)中重复使用(见图1)。由于预算有限,并且从仪表化小尺寸飞机的飞行测试中获得良好的内部经验,因此决定 SHARC 技术演示器应为原始 SHARC 设计的 1:4 比例。该项目的主要目标之一是测试军用无人机的适航过程,即使使用小尺寸飞机也可以实现这一目标。甚至测试演示者的精益开发流程的目标也可以通过这种方式实现。SHARC 项目于 2001 年启动,不到一年后首次飞行,

探索新冠疫情期间建筑环境对共享单车使用的空间异质性影响
共享单车有望在新冠肺炎疫情期间提供可用且健康的出行服务,与公共交通和拼车服务等受限的交通方式相比,共享单车用户可以因保持社交距离而减少出行健康担忧。本研究利用芝加哥 Divvy 共享单车系统的出行数据,探讨了疫情下建筑环境对共享单车使用的空间异质性影响。结果显示,平均每周骑行人数下降了 52.04%。为了解释建筑环境与骑行人数之间的空间异质关系,构建了地理加权回归 (GWR) 模型和半参数 GWR (S-GWR) 模型。我们发现 S-GWR 模型优于 GWR 和多元线性回归模型。S-GWR 模型的结果表明,教育就业密度、与地铁的距离、新冠肺炎病例和新冠肺炎前的骑行人数是全局变量。客流量与建筑环境因素(即家庭密度、办公就业密度和客流量)之间的影响因空间而异。本研究结果可为交通规划人员和共享单车运营商提供有用的参考,以确定疫情下共享单车的高需求区域,从而相应地调整站点位置、容量和重新平衡方案。

对自动驾驶汽车的虚拟现实研究的评论...
1的研究将因子作为独立变量。2不适用的是指设计因素不存在的研究(例如,脱皮的场景,单车)。3案件总数可能大于选定论文的数量,因为一项研究可能包括多个车辆或多种情况。

Plasan_Sandcat-general-brochure-.pdf
Plasan 是首批提供基于 N/GVA 平台的公司之一。使用 Plasan 独特的车载电子解决方案,SandCat 系列已准备好安装任何系统和子系统。集成过程将更加轻松快捷。Plasan 的车载电子基础设施控制、监控和保护车载所有电子系统以及汽车子系统和传感器。Plasan 的车载电子专注于结合汽车和任务系统可操作性,可提供前所未有的态势感知水平,有助于提高安全性和保障性,提高单车、战斗队以及整个车队的可操作性。

HSIA风险DAG叙事
•任何类型的异常事件都受车辆设计的影响,乘员集成水平,自动系统的贡献,系统复杂性,任务架构复杂性(单车,多个车辆,停靠,行星登陆等)。),有效的任务持续时间。在EVA的情况下,西装设计也会影响异常事件。,当由船员降低功能的机组人员以功能障碍或知识不足,技能和能力不足的机组人员执行时,它也会受到时间关键程序执行的影响,可能会导致车辆系统中发生异常事件的错误。


健身与健康市场更新 | 2024 年第二季度
● Tread 成立于 2010 年,总部位于华盛顿温哥华,是一家中型私募股权公司(“发起人”)的投资组合公司,是一家全球垂直整合的品牌健身器材和内容制造商和分销商。作为品牌健身器材收购平台,该公司主要服务于商业健身渠道,为客户提供全系列健身器材(例如跑步机、踏步机、健身单车、自由重量器械等),以满足商业健身设施“四个角落”的需要。Tread 是唯一一家将美国销售和产品开发与自有低成本亚洲制造相结合的全球健身器材制造商,提供无与伦比的品牌、产品和成本优势。自 2020 年 2 月发起人收购以来,该公司已完成四次附加收购并经历了显着增长,目前拥有基于用户感知的前 11 个健身器材品牌中的 5 个。
PMV-4 事故导致一名士兵丧生 - 陆军安全
2023 年 9 月 17 日,当地时间凌晨 2 点,一名被派往科罗拉多州卡森堡的 22 岁专业军人在科罗拉多州科罗拉多斯普林斯的一次 PMV-4 事故中丧生。三名士兵卷入了一场单车翻车事故。士兵 1(乘客)受重伤,士兵 2(乘客)目前靠生命支持系统维持生命。车辆驾驶员受轻伤,正在接受治疗。酒精被怀疑是导致事故的一个因素。事故的具体情况,包括士兵使用安全带或速度是否是导致事故的一个因素,目前尚不清楚。该单位/安全联络点正在等待执法部门发布最终报告。
深圳的数字商业模式:硬件硅谷
每天,全球有超过 20 亿人创建了一个由互联设备组成的网络。到 2020 年,将有 330 亿台设备连接到网络。物联网 (IoT) 和互联消费者的兴起为吸引客户和创造经常性收入开辟了充满希望的新途径。新参与者颠覆了长期存在的行业,挑战了现有企业及其传统商业模式。例如,总部位于深圳的腾讯公司推出的微信移动支付正在让信用卡在中国变得多余。广播平台虎牙正在颠覆传统的电影和电视业务。共享单车系统摩拜正在改变中国和欧洲各城市的出行方式。消费电子公司 Sonos 正在从硬件到内容重塑音乐行业,盈创则正在用 3D 打印房屋和办公楼颠覆建筑业。

危险化学物质运输的多米诺事故的定量风险评估模型
摘要:近年来,危险材料运输事故受到了越来越多的关注。先前的研究集中在涉及单车的事故上。当装有材料的车辆聚集在一条道路上时,潜在的多米诺骨牌事故可能会导致可怕的事件。本文提示了定量风险评估(QRA)模型,以估计多车事件的风险。该模型使用动态贝叶斯网络(DBN)计算危险化学物质泄漏和爆炸的可能性。对于不同类型的危险化学物质,该模型使用事件树列出不同的场景,并分析每种情况引起的多米诺骨牌事故的可能性。FN曲线和潜在的生命损失(PLL)被用作评估社会风险的指数。分析了上海金山区的多个车辆的案件。案件的结果表明,驾驶员的状态,道路类型,天气因素和车辆之间的距离对危险物质运输事故造成的社会风险产生了重要影响。