XiaoMi-AI文件搜索系统
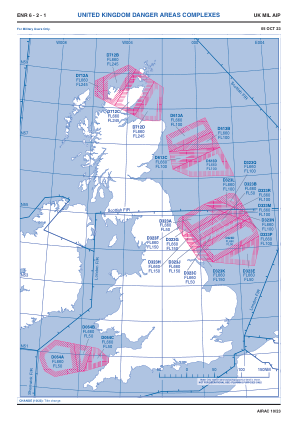
World File Search System危险区域

力士乐 MKD 同步电机,适用于潜在危险区域 II 组 3 类
未经明确授权,禁止复制本文件、将其提供给他人以及使用或传播其内容。违者将承担赔偿责任。在授予专利或注册实用新型或设计(DIN 34-1)的情况下,保留所有权利。

NX-230EX/330EX - 肯伍德
*仅与 NX-230EX/330EX 一起使用时才使用 ATEX/IECEx 认证的配件。 * 1 请勿在危险区域使用此配件。 * 2 根据 ATEX/IECEx 指令 (60079-11: 2011) 第 6.2.5 节的要求,KCT-69EX 对于 KSC-32S 用户是强制性的。当在非危险区域使用 KSC-32S 快速充电器为 KNB-70LEX 电池充电时,KCT-69EX 保险丝盒可保护 NX-230EX/330EX 中的 IS 电路。请务必记住,KSC-32S 不能在危险区域使用(即使使用 KCT-69EX)。 * 3 请注意,标准 KSC-326 多充电器不能与 NX-230EX/330EX 电池一起使用,因为它不是 ATEX/IECEx 认证的配件。
室类型变电站设计和施工标准
因此,变电站室及其访问不得位于AS/NZS 3000:电气安装(称为澳大利亚/新西兰接线规则)中的危险区域。不得在变电站附近没有危险材料或挥发性液体的管道或储存。符合AS 2430.3系列 - “危险区域的分类”和AS2381“用于爆炸性气氛选择,安装和维护的电气设备”是强制性的。应特别注意人员进入,逃脱路线和通风开口,以确保它们不会面对或开放到危险区域。
UI HSC8 - 承重结构保护 - ClassNK
承重结构的保护 2000 年 HSC 规则第 7.4.2.3 款的解释 2000 年 HSC 规则第 7.4.2.3 章内容如下: 位于重大火灾危险区域和中等火灾危险区域内的主要承重结构以及支撑控制站的结构应布置得能分配载荷,使船体和上层建筑在适当的防火时间内暴露在火焰中时不至于倒塌。承重结构还应符合 7.4.2.4 和 7.4.2.5 的要求。 解释 保护时间 位于重大火灾危险区域(分类为 A)和中等火灾危险区域(分类为 B)内的主要承重结构以及支撑控制站的结构防火时间应至少与表 7.4-1 和 7.4-2(如适用)对这些支撑所在处所周围分区的要求相同。根据第 7.4.1.1 款,结构防火时间在任何情况下不得少于 30 分钟。除表 7.4-1 和 7.4-2(如适用)中所述分区外,钢制承重结构无需隔热。结构防火范围考虑的结构应为重度和中度火灾危险区域(分类为 A 或 B)内的所有承重结构以及支撑控制站所必需的所有结构(无论位于何处)。支撑控制站的结构的垂直范围应一直考虑到船体内部的空间。但是,根据 HSC 规则 7.4.2.1(第一部分),船体空隙内的所有结构可免于考虑。防火试验 根据 IMO FTP 规则附件 1 第 11 部分对给定材料的舱壁或甲板进行的标准防火试验的批准可以适用于保护相同材料的支柱。结构防火时间应视为与防火试验中实现的时间相同。 注:1. 本 UI 将由 IACS 协会在 2014 年 1 月 1 日或以后安放龙骨的高速船上统一实施。

用户手册 - Hytera US
● 只能使用本公司指定的 Ex BL2411-Ex 电池。使用其他电池可能会导致防爆保护(本质安全)失效。● 只能在安全区域使用为此目的提供的充电器为电池充电。● 请勿在危险区域从对讲机中取出电池。● 请勿将备用电池带入危险区域。● 仅使用本公司指定的附件。请勿在危险区域更换配件。● 请勿使用损坏的天线。如果损坏的天线接触到您的皮肤,您将面临浅表烧伤的风险。● 请勿将收音机长时间暴露在直射阳光下。请勿将其放置在热源附近。● 使用时请将对讲机保持直立,并使麦克风距嘴部2.5 至5 厘米。● 如果您携带收音机,请确保发射时其天线距离身体至少 1 英寸。● 请勿尝试修理或维护收音机、电池和配件。请联系您的经销商进行维修和保养。● 请勿拆卸或改装对讲机。对无线电设备进行任何未经授权的修改都可能会损害无线电设备的防爆保护(本质安全)。● 除预期用途外,不当使用产品可能会造成损害
KJ3222X1-BA3 AI 8 通道 4-20mA HART 卡系列 2
警告:本产品有专门的安装、拆卸和在危险区域操作的说明。请参阅文档 12P2046“DeltaV TM 可扩展过程系统区域 2 安装说明”。其他安装说明如下