XiaoMi-AI文件搜索系统
World File Search System原型设计
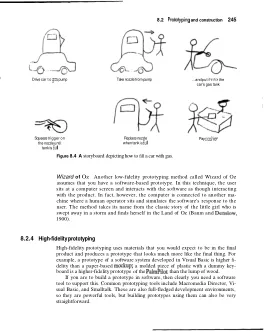
8.2.4 高保真原型设计
当设计经过了足够多次迭代周期,足以确信其符合要求时,必须将通过原型设计和评估迭代步骤学到的所有知识整合起来,以生产最终产品。尽管原型将经过广泛的用户评估,但它们不一定经过严格的质量测试,以测试其他特性,例如稳健性和无错误操作。构建一个供成千上万的人在各种平台和各种情况下使用的产品需要的测试机制与制作快速原型来回答特定问题不同。下面的困境框讨论了两种不同的开发理念。一种方法称为进化原型,涉及将原型进化为最终产品。另一种方法称为一次性原型,使用原型作为最终设计的垫脚石。在这种情况下,

可持续电子设计和原型设计
电子设备在从汽车和智能手机到医疗设备,设备等的所有事物中都起着至关重要的作用。随着新技术的快速进步和部署,使用旧一代硬件的设备很快就会过时,并丢弃了其最新同行的设备。例如,平均智能手机在升级前估计要有2 - 3年[29]。在2019年,电子产品的这种快速消费周期的电子废物量约为5360万吨(MT),预计该数字将在2030年每年迅速增长到74(MT)以上,使电子废物以每年2亿吨的2吨[9]成为增长最快的废物流。同时,电子废物的回收率每年仅增长0.4吨。电子产品是一些最复杂的废物流。这包括用于减少导电迹线的焊料或金和铜的熔点,半导体材料的熔点,例如用于高性能转移的半导体材料,例如用于高性能转移的木质材料,热塑性和热塑性树脂以及各种特种化学物质,例如阻燃剂。尽管这些材料对各自的应用具有理想的特性,但其中许多材料也具有剧毒,对人类健康和环境正义具有重大影响。复杂的性质和危险材料为回收施加了高昂的成本,这导致许多更富有,更发达国家将其电子垃圾发送到国外[30]。在这项工作中,我们探索了图。1。具体来说,我们可以创建一个完全圆形的生产cy-cle,其中可以通过自然生物周期回收,再生或再生电子产品?我们强调,设计包含可生物降解材料的真实设备的这种愿景不是依赖尚未发明的技术的抽象未来。在这项工作中,我们证明可以构建端到端功能鼠标,该端机鼠标结合了现有的可生物降解材料和制造技术。我们选择一只鼠标作为案例研究,并表明我们可以立即减少体现碳足迹并通过设计减轻电子废物的危害。我们通过可持续HCI(SCHI)[2,17,22]的镜头来解决电子废物的问题,并列出了我们在下面概述的设计和原型电子设计的四个指导原理:

下一代产品开发的高级原型设计
如果是这样,3D 打印可能是您的答案。有了如此多样化的材料选择,3D 打印为从概念到最终原型的所有阶段的产品开发开辟了新的可能性。从以前无法通过传统制造方法实现的复杂细节的小部件到更大的部件,使用 3D 打印进行高级原型设计可以产生更好的结果 - 同时降低成本!在本电子书中,我们将介绍如何开始高级原型设计以及使用 3D 打印技术将设计从概念转化为生产的主要优势。因此,如果您渴望了解更多有关如何释放高级原型工程的力量以推动您的产品开发计划的信息 - 请继续阅读!
太空发展部队的原型设计
– SMC – 建造卫星/企业地面系统 – 来自多个承包商的 PTS 有效载荷 – 来自多个承包商的 PTW 调制解调器 – 海军 – 建造 WAMS – 国际合作伙伴 – 进行概念验证演示 – 商业供应商 – 在未来 COMSATCOM 阶段展开合作
通过实验和原型设计来设计复杂的服务
摘要 本文介绍了一项纵向研究,阐述了 2013 年 3 月至 2016 年 12 月期间实施的原型设计过程,以开发一项新服务:远程协助。这种原型设计形式在多个方面都是原创的:其持续时间、与试点客户(法国海军)共同设计的程度以及原型的各个组成部分(工件、环境和流程)与已经显现的“实时”服务之间的接近度。这种原型设计与快速原型设计的愿景形成了鲜明对比。我们证明,除了促进服务解决方案的出现之外,它还使服务概念能够以更接近客户要求的方式开发(就价值主张而言)。最后,我们表明它能够引入真正的服务生态系统并促进对它的投入。关键词:复杂服务、服务概念、服务原型设计、服务价值主张、服务生态系统、远程协助、案例研究、纵向案例
空中交通管制领域的低保真原型设计
正如《空中交通管理总体规划》(SESAR,2015 年)中所述,重大变化将影响未来欧洲空中交通的处理方式。而在 20 年内,空中交通量应该会翻一番,同时地面和空中的延误应该会减少 30%。总体安全性也应该得到改善。与使用标准航路不同,实施 4D 航迹将确保航班“尽可能长时间地沿着几乎不受限制的最佳航迹飞行 [...] 以非常准确地满足指定点的到达时间”(SKYbrary,2017a)。为了能够处理这些创新,空中交通管制员 (ATCO) 需要适当的工具,尤其是用于可视化 4D 航迹的工具。开发安全关键工作环境领域的软件非常具有挑战性,因为操作错误可能会导致致命事故。有必要尽可能密切地与用户组合作,了解他们的需求,并开发出有机会被这些专家用户接受的解决方案。在研究项目 VAST(虚拟空域和塔台)中,将探索可视化和声音化复杂空中交通场景的新概念。该团队遵循以用户为中心的设计流程(Nor-man,2013),并开发了三个低保真原型,以便尽早与 ATCO 一起对其进行评估
巴西隐私增强技术指南原型设计
在墨西哥成功开展透明度和可解释性项目后,Open Loop 转向南锥体,与巴西和乌拉圭的独立实施团队和多家参与公司合作,开展隐私增强技术 (PET) 平行实验。这项工作提供了一个很好的机会,可以深入了解每个国家的特点、政策和制度生态系统,以及每个司法管辖区开始采用 PET 的参与者的性质。它还提供了一个独特的机会来了解 PET 对于全面保护个人数据的重要性,并勾勒出在更广泛采用和使用 PET 方面面临的挑战和机遇方面在两个背景下存在的相似之处。

两轮自驾机器人的开发与原型设计
摘要:移动机器人技术是机器人技术的一个分支,在该分支中,自平衡机器人类别尤其令人感兴趣,因为这些机器人有望像人类一样在困难的地形上行走,并可用作研究自主控制系统的平台。本文旨在总结两轮自平衡机器人的发展,并以此作为案例研究,展示计算机控制系统在物理系统中的应用。互补滤波器与三轴陀螺仪和加速度计一起使用,以精确测量两轮机器人的旋转,并将数据提供给比例-积分-微分 (PID) 程序,该程序相应地控制电机的功率,以控制其倾斜并实现自平衡。简而言之,机器人设法在小倾斜角度范围内实现自平衡,但是,设计缺陷(例如传感器在较大倾斜角度下脱落)会导致较大倾斜角度下的不稳定。在未来的工作中,可以采用更复杂的控制算法,并可以彻底探索不同机器人构造的影响。

设计周期早期的虚拟原型设计.pdf
业界对虚拟原型(有时称为“数字原型”或“虚拟建模”)的采用,受到人们对模拟和计算机建模技术的兴趣的刺激。模拟、计算机辅助设计 (CAD) 和虚拟现实 (VR) 等技术的融合,使得可访问、低成本、用户友好的 VP 系统得以开发。这些 VP 工具越来越多地被视为下一代计算机化设计系统。作为 CAD 的演变,它们已在广泛行业的应用中证明了自己。最终,具有集成数字原型功能的离散 VP 工具和 CAD 系统表明该技术在业务适用性方面日趋成熟,不再被视为实验性技术,而是走向主流设计。