XiaoMi-AI文件搜索系统
World File Search System双重的

双重的新颖的模仿学习框架 -
摘要 - 从人类技能获取的机制中汲取灵感,模仿学习表现出了非凡的表现。近年来,基于模型的模仿学习与机器学习和控制理论相结合,并完整地开发并适应了非结构化的环境。但是,双臂任务的大多数结果都集中在相对安全和稳定的环境上,这些环境仍然缺乏强大的概括技能。在这项工作中,我们为双臂移动任务提出了一个新颖的健壮模仿学习框架。在演示期间,我们提出了一种共同的远程操作策略,该策略积极帮助操作员远程执行双臂任务,旨在减少操作困难和压力。在建模和概括期间,我们提出了一个耦合的线性参数变化的动力学系统(CLPV-DS),该参数具有保护和恢复状态免受环境中可能干扰的能力,同时保持良好的跟踪准确性和稳定性。为了解决由干扰引起的盒装滑动的风险,我们进一步引入了相互的以下策略,使手臂能够合适地跟随彼此,同时保持适当的接触力。考虑到复杂的概括环境中的潜在障碍,我们实时引入了一种反应性障碍策略,以确保全球渐近稳定性。最后,我们通过在2D模拟和实体机器人实验中的全面测试来验证了所提出的框架的有效性。

染色质环境对 Cas9 诱导的 DNA 双重的影响...
。CC-BY-NC-ND 4.0 国际许可,根据 未经同行评审认证)是作者/资助者,他已授予 bioRxiv 永久展示预印本的许可。它是 由 此预印本的版权持有者(此版本于 2020 年 5 月 5 日发布。 ; https://doi.org/10.1101/2020.05.05.078436 doi: bioRxiv preprint
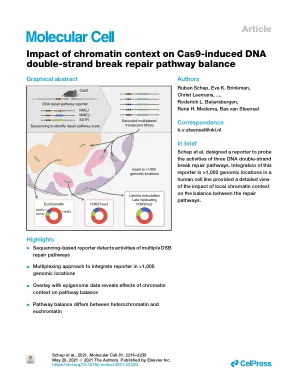
染色质环境对 Cas9 诱导的 DNA 双重的影响...
Ruben Schep, 1 , 2 Eva K. Brinkman, 1 , 2 , 7 Christ Leemans, 1 , 2 Xabier Vergara, 1 , 2 , 3 Robin H. van der Weide, 1 , 2 Ben Morris, 4 , 5 Tom van Schaik, 1 , 2 Stefano G. Manzo, 1 , 2 Daniel Peric-Hupkes, 1 , 2 Jeroen van den Berg, 1 , 3 Roderick L. Beijersbergen, 4 , 5 Rene´ H. Medema, 1 , 3 和 Bas van Steensel 1 , 2 , 6 , 8 , * 1 Oncode 研究所, 荷兰癌症研究所, 1066 CX, 阿姆斯特丹, 荷兰 2 基因调控部, 荷兰癌症研究所, 1066 CX, 阿姆斯特丹, 荷兰3 荷兰癌症研究所细胞生物学部, 1066 CX,阿姆斯特丹,荷兰 4 荷兰癌症研究所分子致癌作用部,1066 CX,阿姆斯特丹,荷兰 5 荷兰癌症研究所机器人筛查中心,1066 CX,阿姆斯特丹,荷兰 6 伊拉斯姆斯大学医学中心细胞生物学系,3015 CN,鹿特丹,荷兰 7 现地址:SciLifeLab,卡罗琳斯卡医学院微生物学、肿瘤和细胞生物学系,Box 1031,171 21 Solna,斯德哥尔摩,瑞典 8 主要联系人*通信地址:bvsteensel@nki.nl https://doi.org/10.1016/j.molcel.2021.03.032

博士课程优惠(2024-2025)
越来越多地,生物工程和机器人技术领域的研究人员和专业人士面临着这样的道德问题。因此,本课程的目标是双重的:发展博士学位学生对研究和专业实践中出现的道德问题的敏感性,并为他们提供知识和工具,以帮助他们导航道德上复杂的情景。

护士2043助产士的药理学和微生物学
描述此主题的目的是双重的。它发展了学生在药理学方面的知识,包括药代动力学,药效学和助产药的质量使用。该主题还建立了微生物学知识以及微生物对母亲,胎儿和新生儿健康的影响,并检查了包括微生物组在内的人体的自然防御能力。
多项式混乱扩展和机器学习
PCE的主要特征是正交多项式家族与输入特征的统计数据之间有很强的联系。这种连接的好处是双重的。首先,如果选择正交多项式与输入数据的概率分布一致,则可以提高PCE响应表面的质量。其次,基于PCE的响应表面的利用简化了灵敏度分析和不确定性定量,因为可以在没有蒙特卡罗模拟的情况下分析地计算多种灵敏度指标。

生物学和人造大脑中的战略决策
本文的目的是双重的。首先,它试图揭示人类和其他动物在非零和游戏中在决策策略中学习的算法,特别是专门针对完全可观察到的迭代囚犯的困境情景。第二,它旨在开发一种新模型来解释战略决策,反映了以前的神经生物学发现,表明不同的大脑电路负责自指的处理和理解他人。该模型源于参与者 - 批评框架,并结合了多个批评家,以允许对自我和他人状态进行独特的处理。我们通过与人类的实验数据进行比较,验证了算法的生物学合理性和可传递性。
COMPANY_BROCHURE.pdf - 普锐特冶金技术
普锐特冶金技术公司的 ECO 解决方案为绿色钢铁生产做出了重大贡献。这些解决方案包括服务和先进技术,可最大限度地减少钢铁生产对环境的影响、提高能源效率并优化副产品管理。普锐特冶金技术为整个钢铁生产链提供专家咨询服务、先进工艺和整体解决方案。ECO 解决方案组合旨在确保遵守最严格的排放法规,并支持钢铁生产商实现大幅成本节约。目标始终是双重的:节约资源和创造价值。
综合投资和政策计划(CIPP)
本文档将印度尼西亚与国际合作伙伴集团(IPG)成员,格拉斯哥金融净零(GFANZ)工作组的成员以及几个多边,国际和国家组织之间的成员结晶了两年的密集和生产性合作。印度尼西亚公正的能源过渡伙伴关系(JETP)旨在全球包容性,承认印尼能源过渡的深远影响。作为一个人口的国家即将超过2.8亿,作为G20集团中为数不多的发展中国家,印度尼西亚的能源过渡过程不仅重要,而且为其他发展中国家树立了先例。因此,印度尼西亚的目标是双重的:实现雄心勃勃的脱碳和强大的经济发展。
LeoLabs 宣布哥斯达黎加太空雷达“...
“哥斯达黎加太空雷达的意义是双重的,”前 NASA 宇航员、LeoLabs 联合创始人 Edward Lu 解释道。“首先,它提供了更高级别的数据,以告知和改进我们为进入低地球轨道的新兴卫星星座提供的运营服务。我们提供的每项服务,例如防撞或早期发射跟踪,都受益于哥斯达黎加太空雷达提供的额外数据。这是基础。其次,”Lu 继续说道,“与我们的其他雷达相结合,哥斯达黎加太空雷达扩展了我们提供低地球轨道中更多物体的实时地图、描述风险并将这种见解提供给我们的客户的能力。这是对太空可持续性和飞行安全的重大贡献。”