XiaoMi-AI文件搜索系统
World File Search System可区分的

交易因果关系订单| Ravi Kunjwal
量子理论接纳了量子非局部性的集合而没有纠缠(QNLWE)。这些合奏由看似古典的状态(它们是完全可区分的且无输入的)组成的,这些状态不能完全歧视本地操作和经典交流(LOCC)。在这里,我们从因果的角度分析了Qnlwe,并展示了如何使用本地操作和经典交流完美地歧视其中的某些集团,而无需确定的因果关系。具体来说,三方访问了无限期因果秩序实例(Araújo-Feix - Baumeler-Wolf进程)可以完美地歧视QNLWE合奏中的状态 - 与本地操作的移动合奏。因此,这种类型的量子非局部性以一定的因果秩序消失,同时保留经典的交流。我们的结果从而利用了LOCC是三个约束的结合的事实:本地操作,经典交流和确定的因果秩序。此外,我们还展示了Araújo-Feix的多部分概括 - Baumeler-Wolf工艺如何转化为展示QNLWE的多Quhitemembles。此类合奏对于加密协议具有独立的兴趣,并且研究了LOCC无法实现的可分离量子操作。

量子信息与计算 讲义
以上内容可能对许多读者来说并不奇怪,但我们可以更进一步——如果信息用比特来表示,那么“什么是比特?” 上面我们将其与布尔变量联系起来,这是一个抽象的数学概念。但这不能是我们的答案,因为当我们获取信息时,我们需要真正接收“一些真实的东西”,而不仅仅是接受一个抽象的数学概念。这里的关键点很好地表达在以下引言中(R. Landauer 1996)“信息不是一个无形的抽象实体;它总是与物理表示相关”。事实上,布尔值 0 和 1 仅用于提供两个可识别的不同标签。所以我们对“什么是比特?”的回答是:比特由任何两个不同的物理状态(某个物理系统的)给出,这两者可以通过物理测量可靠地区分。布尔值 0 和 1 只是页面上两种可区分的物理墨水模式;当我们提出问题并听到“是”或“否”时,我们只是将耳朵用作物理设备来区分空气中两种不同的声波形式;在计算机内存中,比特可以用材料中的两种不同电压电平来表示。这里的关键信息是:“没有表示就没有信息!”

基于摄影测量的逆向工程方法...
摘要。机身内部和外部规格是每个飞机制造商密集的智力努力和技术突破的产物。因此,表征飞机主要气动表面的几何信息仍处于保密状态。在尝试对真实飞机进行建模时,航空界的许多成员依靠他们的个人专业知识和通用设计原则来绕过保密障碍并绘制真实飞机翼型,因此由于不同的设计师的初始假设,同一架飞机的翼型会有所不同。本文提出了一种摄影测量形状预测方法,用于利用真实飞机机身的可公开访问的静态和动态视觉内容来推导其几何特性。该方法基于提取气动表面和机身之间整流罩区域的视觉上可区分的曲线。介绍了两个关于 B-29 和 B-737 的案例研究,展示了如何近似其机翼内侧翼型的截面坐标,并证明了复制翼型的几何和气动特性与其原始版本之间的良好一致性。因此,本文提供了一种系统的逆向工程方法,以增强飞机概念设计和飞行性能优化研究。

这是真正的驱动程序,还是只是机器人?人...- lirias
使用移动式驱动模拟器进行了一个型型人类实验,其中40名参与者,由26名男性和14个女性组成,平均年龄为34.33岁。使用了受试者间的设计,而参与者的人口统计学的分配在群体之间达到了很好的平衡。参与者首先经历了人类驱动的基线,然后是由同一人类驾驶员或AV Conloller进行的其他动作。然后,要求参与者将驾驶行为分类为人类或自动化,并在1到5的李克特量表上提供信心评级。测试了两种类型的控制器:标准模型预测控制器(MPC)和一个名为drividoc的控制器(从视觉从视觉驱动到可区分的最佳控制),以前在人类驾驶示范中训练了端到端模仿学习与MPC结合使用的人类驱动示范。此控制器会根据从相机图像中提取的驾驶上下文自动调整MPC成本函数PA-RAMETER。有关drividoc的更多详细信息可以在[1]中找到。

有效的端到端视觉定位,用于脱钩的BEV神经匹配
摘要 - 准确的定位在高级自主驾驶系统中起重要作用。传统地图匹配的本地化方法通过具有传感器观测值的明确匹配的地图元素来解决姿势,通常对感知噪声敏感,因此需要昂贵的超级参数调整。在本文中,我们提出了一个端到端定位神经网络,该神经网络直接估计车辆从周围图像中构成,而没有与HD图明确匹配的感知结果。为确保效率和可预性能力,提出了一个基于BEV神经匹配的姿势求解器,估计在基于可区分的采样匹配模块中估计姿势。此外,通过将每个姿势DOF影响的特征表示形式解耦来大大降低采样空间。实验结果表明,所提出的网络能够执行分解器水平的定位,平均绝对误差为0.19m,0.13m和0.39◦在纵向,横向位置和偏航角度,同时表现出68.8%的推理记忆使用率降低了68.8%。

有效的端到端视觉定位,用于脱钩的BEV神经匹配
摘要 - 准确的定位在高级自主驾驶系统中起重要作用。传统地图匹配的本地化方法通过具有传感器观测值的明确匹配的地图元素来解决姿势,通常对感知噪声敏感,因此需要昂贵的超级参数调整。在本文中,我们提出了一个端到端定位神经网络,该神经网络直接估计车辆从周围图像中构成,而没有与HD图明确匹配的感知结果。为确保效率和可预性能力,提出了一个基于BEV神经匹配的姿势求解器,估计在基于可区分的采样匹配模块中估计姿势。此外,通过将每个姿势DOF影响的特征表示形式解耦来大大降低采样空间。实验结果表明,所提出的网络能够执行分解器水平的定位,平均绝对误差为0.19m,0.13m和0.39◦在纵向,横向位置和偏航角度,同时表现出68.8%的推理记忆使用率降低了68.8%。

一种新的逻辑、一种新的信息度量和一种基于信息的新方法来解释量子力学
摘要:新的分区逻辑与通常的布尔子集逻辑(通常仅在命题逻辑的特殊情况下出现)是双重的,因为分区和子集是范畴论的对偶。逻辑熵的新信息度量是分区的规范化定量版本。解释量子力学 (QM) 的新方法表明 QM 的数学(而不是物理)是分区数学的线性化希尔伯特空间版本。或者,反过来说,分区数学是 QM 数学的骨架版本。从逻辑到逻辑信息再到量子理论的整个过程中,关键概念是区别与无区别、确定性与不确定性或可区分性与不可区分性。分区的区别是来自底层集合的有序元素对,它们位于分区的不同块中,逻辑熵最初定义为区别的规范化数量。确定性和可区分性的同源概念贯穿于整个量子力学的数学,例如,在关键的非经典叠加概念(=本体不确定性)中,以及在费曼规则中,用于添加振幅(不可区分的选择)与添加概率(可区分的选择)。
基于摄影测量的逆向工程方法...
摘要。机身内部和外部规格是每个飞机制造商密集的智力努力和技术突破的产物。因此,表征飞机主要气动表面的几何信息仍处于保密状态。在尝试对真实飞机进行建模时,航空界的许多成员依靠他们的个人专业知识和通用设计原则来绕过保密障碍并绘制真实飞机翼型,因此由于不同设计师的初始假设,同一架飞机的翼型会有所不同。本文提出了一种摄影测量形状预测方法,用于利用真实飞机机身的可公开访问的静态和动态视觉内容来推导其几何特性。该方法基于提取气动表面和机身之间的整流罩区域的视觉上可区分的曲线。介绍了 B-29 和 B-737 的两个案例研究,展示了如何近似机翼内侧翼型的截面坐标,并证明了复制翼型的几何和气动特性与原始版本之间的良好一致性。因此,本文提供了一种系统的逆向工程方法,将增强飞机概念设计和飞行性能优化研究。

桥接数值模型和机器之间的缝隙...
许多地下流动应用涉及对物理定律充分了解的组成部分,以及在物理定律了解不足或不适用的其他组件中。数值建模在前者方面擅长于以前的机器学习(ML)在后者方面的插值数据,但是两种方法都无法同时解决这些组件。现有的ML方法(通常称为具有物理信息的ML或PIML)同时处理这些类型的组件是对标准ML方法的较小调整(例如,PIML可能会使用物理数据进行训练或损失功能来鼓励ML遵守ML,而无需任何准确保证方程式)。调整黑盒ML模型在根本上受到限制,因为“大数据没有解释自身” - 在模型中意味着,可解释的结构是提高可预测性,使人类理解和最大化小数据影响的必要性。我们展示了可区分的编程(DP)如何使我们能够使用可训练的ML融合值得信赖的数值建模,从而增强了用于物理模型开发,倒数分析和机器学习的工作流程。
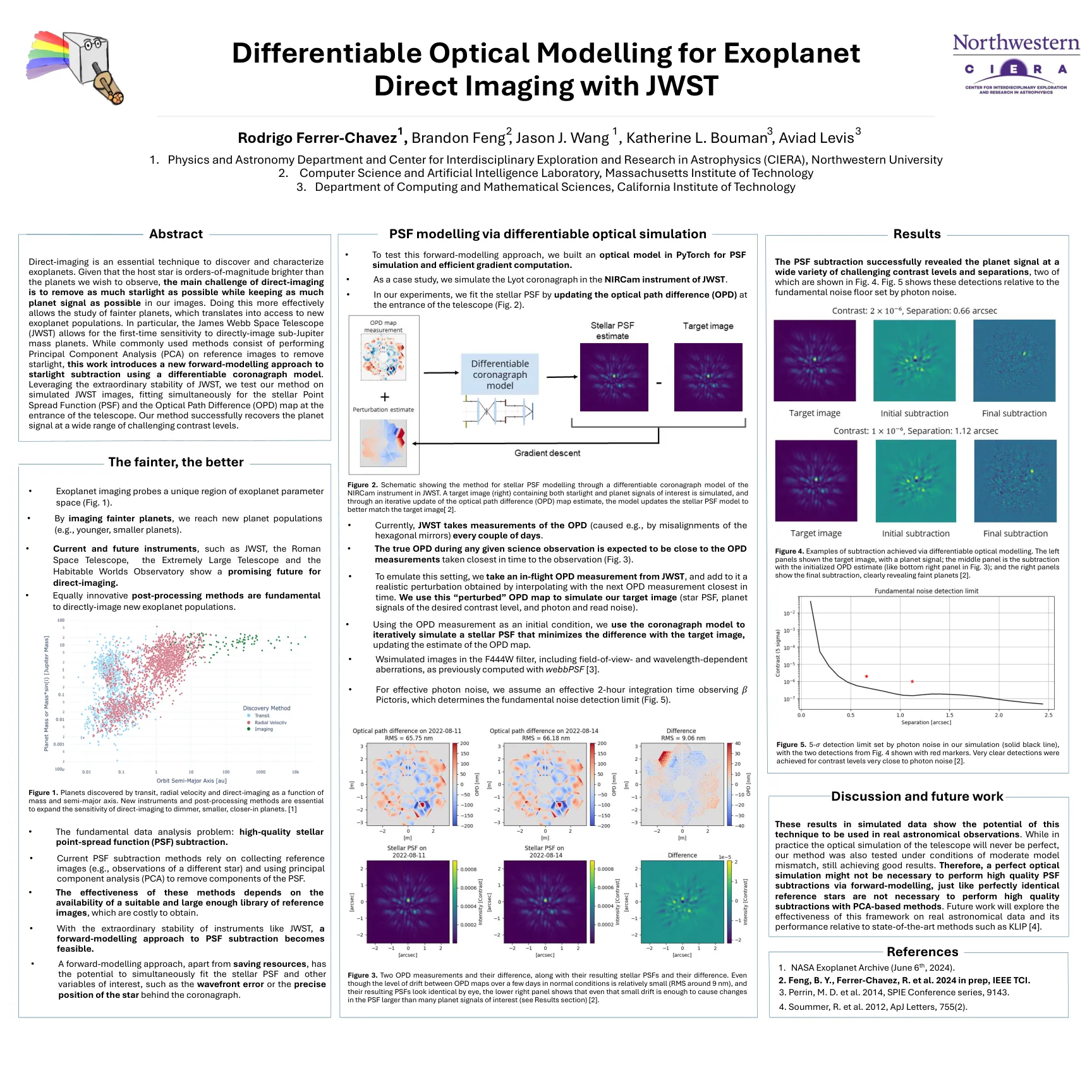
Rodrigo Ferrer-Chavez,Brandon Feng,Jason J. Wang,...
直接成像是发现和表征系外行星的必要技术。鉴于主恒星比我们希望观察到的行星更明亮,因此直接成像的主要挑战是删除尽可能多的星光,同时在我们的图像中保持尽可能多的行星信号。更有效地做到这一点,可以研究淡淡的行星,这转化为对新系外行星种群的访问。尤其是James Webb空间望远镜(JWST)允许对直接图像的子jupiter质量行星具有首次敏感性。常用方法包括在参考图像上执行主成分分析(PCA)以删除星光,但此工作引入了一种新的前向模型方法,使用可区分的冠状动脉模型来减去星光减法。利用JWST的特殊稳定性,我们在模拟的JWST图像上测试了我们的方法,同时拟合了恒星点扩散函数(PSF)和望远镜入口处的光路差(OPD)图。我们的方法成功地以广泛的挑战对比度水平成功恢复了行星信号。