XiaoMi-AI文件搜索系统
World File Search System可见度

可解释的AI-要求书籍章节
1。可解释的AI简介:概念和原理2。可解释的AI技术的演变3。AI系统中的信任和问责制的重要性4。可解释的AI5。可解释AI的跨域应用6。可解释的AI系统中以人为本的设计7。跨域分析的可解释的机器学习模型8。医疗保健中可解释的AI:增强患者的理解9。财务中的可解释AI:确保透明度和遵守范围10。了解AI模型11中的偏见和公平性。在法律和法规合规性中可解释的AI 12.可解释的自主系统AI:确保安全和可靠性13。在可解释的AI中解决隐私问题14。可解释的客户服务中的AI:改善用户体验15。可解释的教育中的AI:支持学习和决策16。在社交媒体中可以解释的AI:增强用户信任和参与度17。可解释的环境监测中的AI:可持续性的见解18。可解释的供应链管理中的AI:提高效率和可见度19。可解释的AI用于风险评估和决策支持20。可解释的AI
Latitude-3450-3550-Spec-Sheet.pdf
dell Security功能Dell Trusted设备Dell Safebios Dell Safeid Dell SafeSupply链Dell Secered组件验证(在云上)Dell可管理性功能Dell命令|更新dell命令|配置Dell命令|集成套件戴尔命令|监视戴尔命令|英特尔vpro从乐队戴尔命令| PowerShell提供商Dell命令| Deploy Driver Packs Dell SupportAssist for Home PCs Dell SupportAssist for Business PCs Dell SupportAssist OS Recovery Dell Optimizer Additional Software Security Features Netskope™ Cloud Access Security Broker (CASB) Netskope™ Secure Web Gateway Netskope™ Zero Trust Private Access Vmware ® Carbon Black Endpoint Standard Vmware ® Carbon Black Endpoint Standard + Secureworks ® Taegis™ XDR Bundle Vmware ® Carbon黑色端点高级VMware®CarbonBlack Endpoint Enterprise企业SecureWorks®Taegis™XDRVMware®工作空间一个标准VMware®工作空间一个高级VMware®工作区一个企业绝对®端点 - 可见度绝对®端点 - 端点 - 控制

使用高频线的空间域意识
空间已成为私营部门和公共部门越来越活跃的运营领域。至关重要的是,国防部(DND)具有准确的手段,以保持对部署的太空资产以及周围威胁的能见度和控制。太空域意识(SDA)是一个概念,它是指对部署的太空资产和其他对象的监视和跟踪,以确保运营安全性。当前的SDA方法包括使用地面和太空光学望远镜,以及在上部频段中运行的雷达。两个线元素集(TLE)是轨道数据最易于访问的手段,并提供轨道位置预测,其精度的精度高达1 km,速度为1 m/s。较小的航天器的日益普及,例如立方体和微型卫星作为进行太空操作的经济手段,这增加了对更准确的SDA的需求。本文测试了使用高频(HF)雷达使用视线(LOS)传播和目标检测来实现准确范围和径向速度估计的可行性。国际空间站(ISS)被选为目标,这是由于其尺寸较大和轨道较低的高度。使用20 MHz的工作频率用于刺穿电离层并照亮所选目标。范围多普勒图,并应用校正以补偿大气和滤波器误差。通过夜间传输期和日期传播期比较了电离层在不同水平的太阳能活动中的效果。使用澳大利亚开源软件的总电子含量(TEC)估计计算范围误差,该估计是澳大利亚开源软件提供的高频射线疗法实验室(PHARLAP)。发现,夜间传输不需要高估的TEC,并且不需要校正,而白天的传输测量结果受到较大TEC的极大影响。白天传输产生的估计的电离层范围延迟高达90 km,多普勒校正高达45 Hz。夜间传输的平均延迟为30公里,多普勒校正最大15 Hz。校正后的最终范围测量值在100秒的可见度中,在夜间传输期间,在100秒的可见度中,均方根误差(RMSE)为61 km。具有如此高范围残差,发现HF不适合精确的范围测量值,除非开发出更好的电离层校正方法并应用了更密集的信号处理技术。然而,夜间和白天传播的多普勒测量值均产生的剩余RMSE小于10 Hz。夜间传输范围率残差仅为85 m/s,在TLE精度的误差范围内。这表明HF可用于使用多普勒测量值进行精确测定。
量子非局域性
这是推导贝尔不等式所需的唯一假设。λ 表示系统状态,可用任何可能的未来物理理论描述(但假设 x 和 y 与 λ 无关)。从这个意义上说,贝尔不等式远远超出了量子理论:违反贝尔不等式证明没有未来理论能够满足局域性条件 (1)。约翰·克劳泽、阿布纳·希莫尼、迈克尔·霍恩和理查德·霍尔特是 20 世纪 60 年代少数理解这一点的人,他们都想检验贝尔不等式,克劳泽想证明量子理论是错误的,而哈佛大学的年轻学生霍尔特想证明贝尔局域性假设 (1) 是错误的。得益于伯克利现有的设备,克劳泽处于有利地位。事实上,卡尔·科克尔也在 1967 年做过类似的实验,不过是出于其他目的。不幸的是,Kocher,甚至更早的吴建雄,只测量了偏振器平行或正交时的关系,而真正违反贝尔不等式需要中间取向。请注意,假设偏振是一个二维量子系统,即今天所说的量子比特,则可以从假设无信号传输的平行和正交关系中推导出 45° 关系 [1]:E 45 = (E +E )/√ – 2。这在当时并不为人所知。但无论如何,Kocher 和吴测得的可见度低于 50%,而真正违反贝尔不等式需要可见度大于 71%。因此,竞赛开始了。Clauser 先到了一步,证实了量子预测,这出乎他的意料。但随后 Holt 也得到了自己的结果,证实了不等式,这出乎他的意料。不知何故,比分竟然是一比一。当时,这些迷人而有趣的结果几乎没有引起任何人的兴趣,除了一些嬉皮士,他们后来可以声称拯救了物理学[2]。克劳塞与他们进行了长时间的讨论,尽管我最后一次见到他时,他已经变成了一个大声的气候怀疑论者。20世纪70年代,我的朋友阿兰·阿斯派克特在非洲做法国公务员,像我们所有人一样阅读物理学。当他偶然发现贝尔不等式时,他一见钟情:“我想研究它”。回到巴黎后,他前往日内瓦会见约翰·贝尔,并告诉他自己的计划。贝尔回答说:“你有永久职位吗?”事实上,在那个时代,研究贝尔不等式——甚至只是表现出对它的兴趣——都是一种科学自杀。教条认为,玻尔已经解决了所有问题。回想起来,很难理解玻尔被贬低得有多深

bevgan:生成鱼眼交叉视图变形金刚
摘要:当前的停车援助和监测系统合成鸟类视图(BEV)图像,以提高驱动程序的可见度。这些BEV图像是使用称为“逆透视图”(IPM)的流行透视转换创建的,该转换将其投射到FishEye摄像头捕获的环绕视图图像的像素上。然而,IPM在准确地表示高度和接缝的对象方面面临挑战,因为它依赖于刚性几何变换,因此将预计的环绕视图缝合在一起。为了解决这些局限性,我们提出了Bevgan,这是一种新型的几何形状引导的条件生成副本网络(CGAN)模型,将多尺度鉴别器与基于变形金刚的生成器相结合,该生成器利用Fisheye摄像机校准和注意力机械机制,以隐含地模拟该视图之间的几个几何形式的变换。实验结果表明,在图像保真度和质量方面,Bevgan的表现优于IPM和最先进的跨视图生成方法。与IPM相比,我们报告了 + 6的改进。在PSNR上的2 dB,MS-SSIM上的 + 170%在描绘停车场和驾驶场景的合成数据集上进行评估。此外,还通过零射推理证明了Bevgan在现实世界中的图像上的概括能力。

量子干涉测量中的路径信息
自从著名的玻尔-爱因斯坦对话以来,人们就知道,在干涉实验中,不可能同时获得最大可见度的干涉图样和路径信息。量子力学的这一特性是其一致性所必需的,费曼 2 将这一特性提升为一个原则:每当不可能(甚至在原则上)获得路径信息时,就必须叠加概率幅度,而不是将概率相加,以进行实验预测。玻尔引入了互补性的概念来描述两个可观测量不能同时精确知道的情况,海森堡不确定性原理就是其中的一个特例。对于玻尔来说,互补性是由于测量一个量(例如位置)的仪器的设计本身就排除了对互补量(这里是动量)的测量。在本文中,我们讨论了干涉和路径信息之间互补性的三个明确情况,并提出了一些有趣的结果。在第 2 节中,给出了双光子量子擦除器的实验实现;在第 3 节中,我们讨论了基于这些想法实现新的纠缠光子强源;在第 4 节中,我们介绍了与路径信息考虑密切相关的 Aharonov-Bohm 和 Einstein-Podolsky-Rosen 非局域性尖端之间的非平凡关系。

集成 SiC 平台中的纠缠光子对生成
摘要:纠缠在量子信息处理中起着至关重要的作用。由于其独特的材料特性,碳化硅最近成为可扩展实现先进量子信息处理能力的有希望的候选者。然而,迄今为止,在碳化硅中仅报道了核自旋的纠缠,而纠缠光子源,无论是基于块体还是芯片级技术,仍然难以捉摸。在这里,我们首次报告了集成碳化硅平台中纠缠光子源的演示。具体而言,通过在4H绝缘体上碳化硅平台中的紧凑微环谐振器中实现自发四波混频,在电信C波段波长处有效地产生强相关的光子对。在泵浦功率为 0 时,最大巧合与意外比率超过 600。17 mW,对应的成对率为 ( 9 ± 1 ) × 10 3 对/秒。针对此类信号-闲置光子对创建并验证了能量-时间纠缠,双光子干涉条纹的可见度大于 99%。还测量了预期的单光子特性,预期的 𝑔 ( 2 ) ( 0 ) 约为 10 − 3 ,表明 SiC 平台有望成为量子应用的完全集成、CMOS 兼容的单光子源。
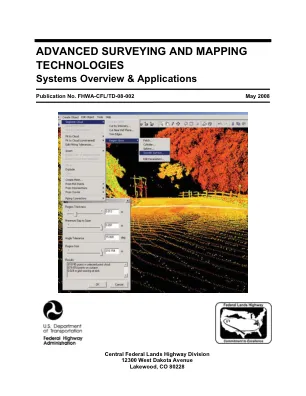
先进的测绘技术
本研究于 2002 年和 2003 年进行,旨在评估先进测绘技术对联邦公路管理局联邦土地公路部门典型任务的适用性。地面激光扫描系统已被确定为一种可用于测绘任务的新兴技术。该研究包括在加利福尼亚州里弗赛德现有项目现场对激光扫描方法进行现场演示。陡峭的地形和茂密的灌木丛导致能见度受限,无法成功对许多目标位置进行地形测绘。地面激光扫描在那些能见度和访问不太复杂且可以利用点云数据提供的丰富细节和准确性的有限应用中具有优势。可能的示例应用可能是历史资源的记录或结构的详细测绘。机载光探测和测距 (LiDAR) 与地面激光扫描类似,但其向下看的视角和快速的线性覆盖更适用于路线测量。 LiDAR 任务可提供大量数据点,通过点云数据实现可视化和虚拟地形测绘。机载 LiDAR 还发现,在茂密的植被中,可见度有限,因此森林茂密的地区和浓密的灌木丛并不是最佳应用。还必须考虑

硝化抑制剂对氮浸出和酶活性的影响
摘要:使用尿素肥料的硝化抑制剂(Thiourea和硝化抑制剂“ A”)用于提高氮效率。硝化抑制剂和氮量通过尿素肥料施加到蛋白表中的水稻种子。整个实验是通过以下治疗方法进行的; urea application as a control at 2gN/10kg (200 kg N/ha), urea application 2gN/10kg (200 kg N/ha) added with 1.0%, 0.5%, 0.1%, 0.05% and 0.01% of thiourea (w/w) and urea application 2gN/10kg (200 kg N/ha) added with 1.0%, 0.5%, 0.1%, 0.05% and 0.01% of nitrification抑制剂“ A”(w/w)单独和组合形式。浸出样品是从圆柱裂解器中引起的,并在第一次,3 2秒,第三和第四周观察到NO和NO氮。使用紫外可见度3 2分光光度计,也观察到了NO和NO还原酶的活性。发现所有治疗方法都降低了硝化过程中涉及的氮浸出和酶活性。还可以观察到,硫脲,硝化抑制剂的0.01%和硝化抑制剂“ a”的含量为“ A”,以降低浸出样品3 2中的NO和NO浓度,并在第四周后降低了土壤中NO和无还原酶的活性。3 2

使用Li-Fi技术的车辆碰撞检测和预防系统
摘要 - 该项目解决了高速公路上驾驶员隐身性的关键问题,这通常会导致碰撞,尤其是当较小的车辆接近大型车辆(例如公交车或卡车)时。高速公路上的驾驶员隐身通常会导致事故,尤其是当较小的车辆接近较大车辆(如公共汽车或卡车)时。该项目使用图像处理和基于LIFI技术的实时车辆检测和通信系统。在重车上,有一个相机和一个Li-Fi发射器,而接近的车辆具有Li-Fi接收器。如果较小的车辆太近,则系统会发出仪表板警告的警告。该系统致力于减少与盲点和较晚反应有关的事故。具有基于Python的图像处理,在每种类型的天气和照明条件下都会发生准确的检测。NodeMCU微控制器控制图像处理单元和LI-FI发射器的数据流。实时数据通过LI-FI传输到传入的车辆,允许驾驶员更快地响应。该系统的延迟非常小于100毫秒,因此减少了后端碰撞,尤其是在可见度较差的情况下。这种具有成本效益和可扩展的解决方案适用于商用和乘用车,并突出了Li-Fi技术在改善汽车安全性方面的潜力,尤其是在基础设施有限的地区。