XiaoMi-AI文件搜索系统
World File Search System周期时间

模块化开放系统方法 - INCOSE
模块化开放系统方法 (MOSA) 可以简洁地定义为“一种集成的业务和技术策略,旨在实现系统生命周期内具有竞争力且价格合理的采购和维持”。实施此方法的目标是确保系统尽可能采用高度内聚、松散耦合和可分割的模块进行设计,这些模块可以单独竞争并从独立供应商处采购。这可以让国防部获得作战能力,包括系统、子系统、软件组件和服务,与以前的专有程序相比,它们具有更高的灵活性和竞争力。MOSA 意味着使用模块化开放系统架构:这是一种现有概念,其中系统接口共享通用且被广泛接受的标准。MOSA 在新采购中采用的主要驱动力源自国会在 2017 年国防授权法案中的授权,即在 2019 年 1 月之前在国防部的重大采购中使用 MOSA。技术和威胁的快速发展需要更快的部署和修改作战能力的周期时间,而 MOSA 有可能加速和简化新能力的交付以满足这一需求。本文从供应商和收购方的角度讨论了 MOSA 原则发展的重要方面,并提出了十 (10) 条建议,以帮助社区成功采用 MOSA。这些建议是:
识别电动汽车的锂离子电池老化中的驾驶行为
摘要:供应链不确定性很高,这是由于上游和下游的信息透明度较低,供应链规划较长的交货时间,较短的产品生命周期,冗长的生产周期时间以及连续的技术迁移。新的供应计划的构建和创新面临着巨大的挑战。本研究的目的是通过计划进行检查的管理周期提出一个具有决策模式的智能弹性供应链框架。它可以增强供应链的弹性并增强工业竞争力。此外,对半导体分布的需求预测和风险推断的实证研究是作为验证进行的。通过需求模式聚类和对历史客户订单行为的预测,每个客户的需求状态是分类的,并发布了最佳计划解决方案以支持决策。结果表明,提出的方法是推动协作努力来增强需求风险管理以提高供应链弹性的实践可行性。所提出的预测模型的性能比所有四个基准模型都更好,并且对拟议风险参考模型的修订召回均显示出所有需求风险水平的高精度。由于供应链的弹性将由于工业革命而重建,因此政府和行业联盟应遵循弹性供应链蓝图,以使制造策略成为行业4.0时代的技术平台。
加法制造
• Rapid prototyping ideal for high-mix, low-volume production • Generate slices and robot trajectories directly from a CAD model using one software solution • Program optimization via automatic tool orientation control for minimizing wrist rotation and maximizing robot reach • Full control over process-specific parameters such as stepovers, multi-layer offsets, and deposition rate by layer • Perform workspace analysis to easily identify potential reach issues and optimize cell设置•利用自动刀具路径优化功能,以避免机器人错误和碰撞•减少后处理和碎屑的量,并获得一致,准确且可重复的结果一致,准确且可重复的结果•减少复杂零件的周期和少量运行的周期时间•最大化盈利能力•最大化盈利能力并提高机器人的投资范围•创建表面上的速度•创建真实的范围•创建3.型号的范围•远处•避免了3台,•创建3.将材料沉积在弯曲的表面上,例如涡轮刀片,凹形物体等等•使用自定义指南曲线/网格定义工具路径的方向•轻松从slic3r和cura等流行软件的3D打印Gcode(例如,例如SliC3R和Cura)生成机器人轨迹。Robotmaster支持Reprap Flavor Import Import,允许用户以其过程相关信息导入3D打印专用路径
产品供应链绩效分析 - Digilib Unila
Nike Margie Utami 本研究旨在分析(1)分析产品流、资金流和信息流(2)分析供应链条件,以及(3)供应链绩效。本研究采用了 Sahabat Hidroponik 和 Sayuran Kita 的案例研究方法。研究中的受访者是生产者农民、生产者、零售商(超市)和消费者的合作伙伴。研究中的数据收集于 2022 年 4 月至 7 月进行。数据分析采用描述性定性和定量方法。结果表明:(1)涉及的产品流是生产者农民合作伙伴、生产者、零售商和消费者,资金流在生产者农民合作伙伴和零售商之间并不有效,而信息流之所以有效,是因为所有成员都愿意共享信息。 (2)使用食品供应链网络(FSCN)方法测量 Sahabat Hidroponik 的供应链状况非常有效,但尚未达成书面合同协议;Sayuran Kita 的供应链状况已显示出非常有效的状况,但与系统交易相关的供应链管理已经持续了很长时间。 (3)使用供应链运营参考(SCOR)方法测量 Sahabat Hidroponik 和 Sayuran Kita 的供应链绩效处于优等标准,但日常供应、订单履行、标准符合性等指标处于劣势标准,而订单履行和现金到现金周期时间未包含在标准中(未分类)。 关键词 : FSCN、水培蔬菜、绩效、SCOR、供应链
摩尔定律通过芯片化演变...
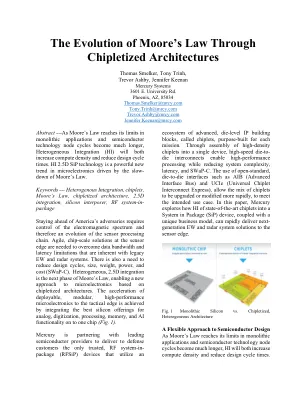
摘要 ---随着摩尔定律在单片应用方面达到极限并且半导体技术节点周期变得更长,异构集成 (HI) 将既能提高计算密度又能缩短设计周期时间。HI 2.5D SiP 技术是微电子领域的一个强大新趋势,其驱动力来自摩尔定律的放缓。 关键词 --- 异构集成、芯片、摩尔定律、芯片化架构、2.5D 集成、硅中介层、射频系统级封装 要保持领先于美国的对手,就需要控制电磁频谱,因此需要传感器处理链的演变。需要在传感器边缘采用敏捷的芯片级解决方案来克服传统电子战和雷达系统固有的数据带宽和延迟限制。还需要缩短设计周期、尺寸、重量、功耗和成本 (SWaP-C)。异构 2.5D 集成是摩尔定律的下一阶段,它支持基于芯片化架构的微电子新方法。通过将用于模拟、数字化、处理、内存和 AI 功能的最佳硅片产品集成到一块芯片上,可以加速可部署、模块化、高性能微电子技术向战术前沿的推进(图 1)。Mercury 正在与领先的半导体供应商合作,为国防客户提供唯一值得信赖的 RF 系统级封装 (RFSiP) 设备,这些设备采用了

人机协作装配任务中的脑机接口和手动引导控制
摘要:协作机器人 (Cobots) 是一种小型机器,可编程执行各种任务,能够减轻操作员的工作条件。因此,它们可以用于中小型企业,这些企业的特点是生产批次小,任务复杂多样。要开发实际的协作应用,需要合适的任务设计和人机之间的合适交互策略。实现人机之间有效、高效的通信策略是协作方法的里程碑之一,它可以基于多种通信技术,可能以多模式方式实现。在这项工作中,我们专注于合作装配任务。利用脑机接口 (BCI) 向协作机器人提供命令,使操作员能够在所需的时间在独立和合作协助模式之间切换。当操作员查看与不同命令相对应的两个闪烁屏幕时,可以根据收集的大脑命令激活这两种控制,这样操作员就不需要腾出双手向协作机器人发出命令信息,并且可以加快装配过程。通过在装配应用中开发和测试交互来验证所提方法的可行性。对同一装配任务的周期时间(有无协作机器人支持)进行了比较,比较了平均时间、变化性和学习趋势。因此,评估了所提交互策略的可用性和有效性,以评估所提解决方案在实际工业环境中的优势。

丰富的配置
提升高度高达1240万,过道宽度狭窄至1.8m。Nalift的托盘位置比平衡叉车多50%,托盘位置比到达卡车高30%。220°铰接角,在超鼻涕过道中起作用。80V ZAPI AC双核控制器,凉爽的工作环境,无错误。80V AC提升和驾驶电动机,免费维护,功能强大,高效效率。比例阀,可以根据工作条件进行调整阀速度,从而更容易,更准确地在狭窄的过道中拾起/卸载托盘。指尖控制提供了更好的控制体验,提供了更舒适,更准确的操作。它也具有特殊的选择模式。具有更好的英寸移动性能,它使Nalift VNA非常适合高起重和狭窄的过道工作情况。强大的底盘和桅杆结构可确保重型使用。nalift可以在内外的任何地面上运行,消除双重处理,一步一步将托盘从货车转移到机架,因此可以节省很多时间和金钱。维护成本的显着少于正常卡车/秋千卡车。人体工程学设计使Nalift提供更快的负载周期时间并减少驱动因素疲劳。提供铁锂电池(可选),免费维护,更长的工作寿命。本地经销商支持和工程师服务。

表面代码阈值下方的量子误差校正
量子误差校正1-4通过将多个物理量子器组合到逻辑量子位中,提供了达到实用量子计算的途径,其中添加了更多的量子器,将逻辑错误率指数置于指数抑制。但是,仅当物理错误率低于临界阈值时,这种指数抑制才会发生。在这里,我们在我们最新一代的超导处理器柳树:距离-7代码和与实时解码器集成的距离-7代码和距离-5代码上介绍了两个以下阈值表面代码记忆。将代码距离增加2时,我们较大的量子存储器的逻辑错误率被λ= 2.14±0.02抑制,最终以101 Qubit的距离-7代码为0.143%±0.003%误差误差误差。这种逻辑记忆也超出了盈亏平衡,超过了其最佳物理值的寿命2.4±0.3。实时解码时,我们的系统保持低于阈值的性能,在5到100万个周期的距离时,平均解码器延迟为63微秒,周期时间为1.1微秒。我们还将重复代码运行到距离29,发现逻辑性能受到罕见相关误差事件的限制,大约每小时发生一次或3×10 9周期。我们的结果表明设备性能,如果缩放,则可以实现大规模易于故障量子算法的操作要求。

端到端的基于深度学习的路径计划和碰撞检查框架:bin选择应用程序
抽象的实时和效率路径计划对于所有机器人系统至关重要。,对于工业机器人而言,这更为重要,因为总体计划和执行时间直接影响生产线中的周期时间和自动化经济学。尽管在静态环境中问题可能并不复杂,但在计划时间和最佳性方面,经典方法在高维环境中是不可能的。碰撞检查在获得复杂环境中的路径计划的实时解决方案方面提出了另一个挑战。为了解决这些问题,我们提出了一个基于端到端的学习框架,即路径计划和碰撞检查网络(PPCNET)。PPCNET通过使用两个网络顺序计算航路点来生成路径:第一个网络生成了路点,第二个网络确定路径是否在路径的无碰撞段上。端到端培训过程基于模仿学习,该学习使用来自专家规划师的经验的数据聚合来同时培训两个网络。我们利用两种方法来训练一个有效近似确切几何碰撞检查功能的网络。最后,在两个不同的仿真环境中评估了PPCNET,并在用于BIN采摘应用程序的机器人臂上进行了实际实现。与最先进的路径规划方法相比,我们的结果通过以可比的成功率和路径长度大大减少了计划时间,显示出绩效的显着改善。
测量辅助装配的研究重点
摘要 :本文首次提出测量辅助装配(MAA)的概念,并概述了在工业中实现该概念的研究重点。MAA 表示高价值和复杂产品装配的范式转变,包括开发和使用新颖的计量流程,以全面集成和提高关键装配和辅助流程的能力。本文详细介绍了 MAA 的完整框架,展示了它如何促进大型复杂产品(如机身)装配过程能力和效率的逐步改变,而传统装配过程需要整改和返工,使用不灵活的工具并且主要是手动的,从而导致成本和周期时间压力。MAA 的概念包含一系列创新的测量辅助过程,这些过程可以实现快速的零件到零件装配、更多地使用灵活的自动化、可追溯的质量保证和控制、减轻结构重量以及提高整个尺寸尺度的精度水平。在实验飞机机翼上进行了 MAA 技术的全面工业试验,证明了该方法的可行性,而 140 家小公司的研究则强调需要更好地采用现有的工艺能力和质量控制标准。MAA 确定的研究重点包括开发无框架和工具嵌入式自动计量网络。其他研究重点涉及开发集成尺寸变化管理、热补偿算法以及将设计与测量和工艺规划联系起来的测量规划和检查算法。