XiaoMi-AI文件搜索系统
World File Search System器人

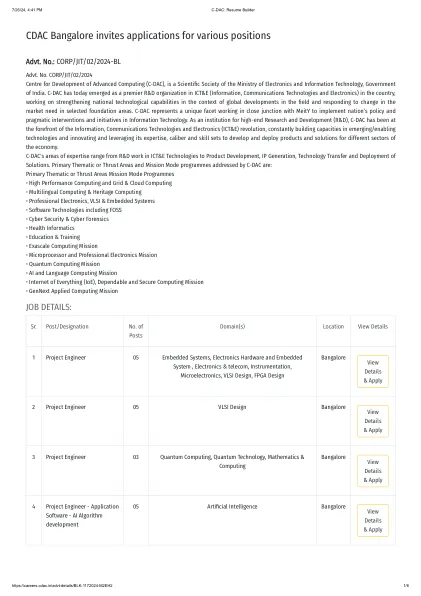
C-DAC:简历构建器
advt。编号Corp/JIT/02/2024高级计算开发中心(C-DAC)是印度政府电子和信息技术部的科学学会。c-DAC如今已成为该国ICT&E(信息,通信技术和电子产品)的首要研发组织,在该领域的全球发展中致力于加强国家技术能力,并响应选定基金会地区市场需求的变化。c-DAC代表了与Meity紧密连接的独特方面,以实施国家的政策和务实的干预措施和信息技术计划。作为高端研究与开发的机构(R&D),C-DAC一直处于信息,通信技术和电子(ICT&E)革命的最前沿,不断建立新兴/启用技术的能力,并创新技术,并利用其专业知识,能力和技巧,以开发和部署不同的产品和部署不同的产品和解决不同的经济。C-DAC的专业领域范围从ICT和E技术的研发工作到产品开发,IP生成,技术转移和解决方案的部署。Primary Thematic or Thrust Areas and Mission Mode programmes addressed by C-DAC are: Primary Thematic or Thrust Areas Mission Mode Programmes • High Performance Computing and Grid & Cloud Computing • Multilingual Computing & Heritage Computing • Professional Electronics, VLSI & Embedded Systems • Software Technologies including FOSS • Cyber Security & Cyber Forensics • Health Informatics • Education & Training • Exascale Computing Mission • Microprocessor and Professional Electronics Mission •量子计算任务•AI和语言计算任务•所有事物的互联网(IOE),可靠且安全的计算任务•Gennext应用计算任务

电磁时空分化器
可以在空间和时间域中执行数学操作的时空光学计算设备可以提供前所未有的措施来构建高效且实时的信息处理系统。尤其重要的是要在紧凑的设计中实现综合功能,以更好地与电子组件整合。在这项工作中,我们基于非对称的跨表面的微波中的模拟时空区分剂实验表明,该微波在时空域中具有相位奇异性。我们表明,这种结构可以通过调整Spoof表面等离子体偏振子(SSPPS)的单向激发来引起理想的一阶区分和时间域中理想的一阶区分所需的时空传递函数。使用金属缝进行空间边缘检测,并通过不同宽度的高斯样时间脉冲检查设备的时间分化能力。我们进一步证实了此处证明的区别,即使有复杂的曲线,也可以检测到时空脉冲的急剧变化,理论上估计了空间和颞边检测的分辨率限制。我们还表明,通过此处实施的时空差异剂后的脉冲输入可以携带带有分形拓扑电荷的横向轨道角动量(OAM),从而进一步增加了信息数量。

内存恢复对准器
哈里亚纳邦,印度摘要 - 牙科领域的形状记忆聚合物的出现,在很大程度上简化了工作。在诸如Archwires和Arigners(Archwires and Aligners)等各种正畸应用中的用法也已被证明至关重要。已知的合金,例如氧化锆和智能 - 密集是形状记忆材料的示例,在牙科中表现出智能行为。随着材料科学开发和应用这些智能材料的趋势的日益增加,这些材料可能会允许开创性的牙科疗法,并具有显着增强的治疗临床结果。可以将对准器的历史记录追踪回凯斯林,凯斯林(Kesling)描述了牙齿最终的牙齿定位器以及1945年的有效固定装置,然后是1964年的Nahoum2,开发了真空塑料的“牙齿轮廓”设备,这些设备是热塑性的,最适合牙齿使用。他开发了使用连续电器的概念,并进行了较小的增量变化,重大更正驾驶室是基于流行的Essix设备和Invisalign的构建而形成的。本文的目的是回顾形状记忆对准器的历史以及经过验证的研究,以及它将在正畸领域应用。本文还通过库存中的智能材料代替常规材料来讨论患者以及牙医的潜在好处。索引项 - 对准器,形状内存,CAT,SMP。

Ingiantsin胶结器(ARNI)
大多数服用Arni的人没有副作用。您的其他健康问题和药物会影响哪些副作用可能发展。请与您的医疗保健提供者讨论要注意的副作用,因为有些是认真的。另外,请与您的社区药剂师联系。请知道,让Arni剂量开始低,然后增加到“目标”剂量 - 最有效的剂量是很常见的。将药物剂量增加到靶剂量是通常治疗的一部分,而不是问题的迹象。

基于人工智能的医疗器械EndoBRAIN的临床实施——监管……
我首先谈谈财务方面的挑战。 为了获得监管部门的批准,药品必须经过日本药品和医疗器械管理局(PMDA)的审查,并获得厚生劳动大臣的批准,这需要相当大的成本。 这笔不小的费用还不包括支付给PMDA的官方费用(从几十万日元到最高的200万日元不等)。 性能评估测试和临床试验所需的资金远远超过这个数额(比支付给PMDA的费用高出一个甚至两个数量级),因此参与AI研发的研究人员必须始终牢记这个数额。 具体来说,除了进行试验的实际成本外,还需要咨询费、数据中心费和分析费,以实现确保PMDA规定的质量所需的试验设计。 如果需要进行前瞻性随机对照试验,这个数量会更大,因此需要谨慎。 有时,可能有必要故意限制医疗设备的有效性,以避免严格的临床试验的要求。 不管怎样,如此庞大的资金量,一般的非医疗公司或者初创企业往往难以拿出来。 幸运的是,我们能够通过获得 AMED(医疗器械开发促进研究项目(2017-2019,首席研究员:Kudo Susumuhide))的竞争性研究资金来支付监管批准的费用。 具体而言,在AMED的支持下,自2017年起在多个机构(昭和大学、国立癌症中心医院、国立癌症中心东医院、静冈癌症中心和东京医科牙科大学)进行了性能评估测试,并在公共研究资金的支持下准备了药物批准申请所需的数据。 然而,获得此类公共研究资金并不常见,许多无法自行进行足够资本投入的公司(尤其是初创公司)可能需要从风险投资公司或银行获得药品测试和批准的资金。 除了财务上的挑战之外,由于这是内窥镜 AI 医疗设备的首次申请,我们必须与 PMDA 进行多次面对面的咨询,以确保药物顺利获得批准。

人工智能在除颤器中的作用
摘要 自动体外除颤器 (AED) 和植入式心脏复律除颤器 (ICD) 用于治疗危及生命的心律失常。在临床实践中,AED 和 ICD 使用电击建议算法将心电图描记图分类为可电击或不可电击心律。最近,机器学习算法已被评估用于电击决策分类,其准确性越来越高。除了心律分类之外,它们还被用于诊断心脏骤停的原因、预测除颤成功率和无需中断心肺复苏的节律分类。本综述探讨了机器学习在 AED 和 ICD 中的众多应用。虽然这些技术是令人兴奋的研究领域,但它们的广泛使用仍然存在局限性,包括高处理能力、成本和“黑匣子”现象。
量子检查器 - LIACS 论文库
4 设计与实施 13 4.1 原始规则集:经典跳棋 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 4.1.4 结果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ... ...22
使用大猩猩部队优化器
主要目标是通过最大程度地减少运营成本,污染物排放和传输损失来优化发电输出的小时分配,并确保遵守一系列平等和不平等约束。为了应对这一挑战,提出了一种受大猩猩行为启发的新型元疗算法。Gorilla部队优化器(GTO)用于5和10分单元系统,将可变的风能和太阳能整日集成,负载需求各不相同。证明了GTO算法在处理混合动态的经济和环境调度问题方面的有效性,包括平等限制,传输损失,阀点效应,禁止的操作区域,坡道速率和功率限制,其性能与其他优化技术相比。调查结果表明,GTO提供了发电机的最佳计划,从而大大降低了每日运营成本和较高百分比的排放。此外,可再生能源的整合显着降低了污染物的气体排放,燃料成本和传输损失,同时满足所有施加的约束。这项研究积极地有助于提高电源系统的可靠性,同时减少环境污染,传输损失和燃料成本。