XiaoMi-AI文件搜索系统
World File Search System地面



1-fundamentals.pdf - 地面学校
首次飞行 获得单飞所需的“学生飞行员执照” 首次单飞 首次越野飞行 首次长途越野飞行(私人飞行员) 首次夜间越野飞行(私人飞行员) 通过航空笔试 通过飞行检查 – 获得执照 驾驶您的第一位乘客

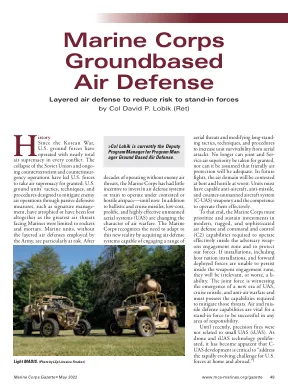
海军陆战队地面防空
空中威胁,并修改长期战术、技术和程序,以提高部队在空中袭击中的生存能力。联合和军种空中优势不再是理所当然的,也不能假设友军的空中保护就足够了。在未来的战斗中,空中领域在最好的情况下将是争夺,在最坏的情况下将是敌对的。部队必须拥有强大的防空、反导弹和反无人机系统 (C-UAS) 武器,并具备有效操作它们的能力。为此,海军陆战队必须优先考虑并持续投资于现代、坚固和先进的防空和指挥控制 (C2) 能力,以便在敌方武器交战区内有效行动并保护我们的部队。如果包括东道国设施在内的设施和前沿部署部队无法在武器交战区内坚持下去,它们将变得无关紧要,甚至更糟,成为负担。联合部队正在见证无人机、巡航导弹和防空战新时代的到来,必须具备缓解这些威胁所需的能力。防空和导弹防御能力对于预备部队在任何责任区取得成功都至关重要。直到最近,精确射击还与小型无人机 (sUAS) 无关。随着无人机和 sUAS 技术的普及,很明显,反无人机的发展对于“应对美国国内外军队迅速发展的挑战”至关重要。1
