XiaoMi-AI文件搜索系统
World File Search System基准

VK0192 数据手册
时序基准发生器是一个 8 级递增计数器 , 可以精确的产生时基。看门狗 ( WDT )是由一个 时基发生器和一个 2 级计数器组成,它可以在主控制器 或其它子系统处于异常状态时产生中断。 WDT 计数溢出时产生一个溢出标 志,此标志可以通过命令输出到 /IRQ 脚 ( 开漏输出 ) 。时序基准发生器和 WDT 时钟的来源。时基和看门狗共用 1 个时钟源,可配置 8 种频率: f WDT = f sys/2 n ( n=0~7 )


postrainbench:综合基准
准确的降水预测是社会重要性的重要挑战。尽管数据驱动的方法已成为一种广泛使用的解决方案,但仅依靠数据驱动的方法在建模基础物理学方面存在局限性,从而使准确的预测变得困难。我们专注于基于数值的天气预测(NWP)基于后加工的降水预测任务,将机器学习技术与传统NWP息息。由于降水数据不平衡和多个气象变量之间的复杂关系,此任务仍然具有挑战性。为了解决这些局限性,我们会引入Poststrainbench,这是一种全面的多变量NWP后处理基准和CAMT,CAMT是一种简单而有效的渠道注意力,增强了具有特殊设计的加权损失功能的多任务学习框架。对拟议的基准的广泛实验结果表明,我们的方法在雨水CSI中的最先进方法胜过6.3%,4.7%和26.8%,改善了15.6%,17.4%,17.4%和31.8%的NWP预测,而NWP高于NWP,而NWP则在各个数据集中的CSI中的NWP预测高于NWP。最值得注意的是,我们的模型是在大雨条件下胜过NWP方法的第一种深度学习方法。这些结果突出了我们模型在减少极端降雨事件的严重后果方面的潜在影响。我们的数据集和代码可在https://github.com/yyyujintang/postrainbench上找到。


Temenos值基准
“我从Temenos价值基准中获得的价值的一个很好的例子,以及为什么我鼓励我的银行同行参与该计划的原因是我在报告的第1页上收到的指标:它的成本为百分比。这个基准指标在向我揭示了我的真实成本,以及我如何在我成为加拿大第一个数字挑战者的客户群时继续优化和自动化时,我必须继续优化和自动化。”
可靠性和可持续性的基准。
可以使绿色氢变得更绿吗?是的,使用我们高效的innomotics低压电动机从0.09到1,000 kW。他们具有与氢行相关的所有证书,并且可以直接与任何转换器一起运行。这意味着他们可以在主和辅助过程的低或中等效果范围内有效地操作任何数量的泵,风扇和压缩机,包括使用爆炸保护操作。对于经常存在充满氢气的大气(1区,气体IIC)的植物部分,并且取决于驱动器任务,在带有Ex db eB IIC或Ex ex db IIC保护的防爆炸式外壳中,Innomotics XP电动机提供的最大爆炸保护是最佳解决方案。在不受爆炸危害的区域(例如,在热交换器周围)的区域 - innomotics XP,对2号爆炸保护区2,Ex ec IIC,这是足够的。对于没有爆炸危险的工厂区域,最好的选择是Innomotics SD系列中坚固的高效铸铁电动机。
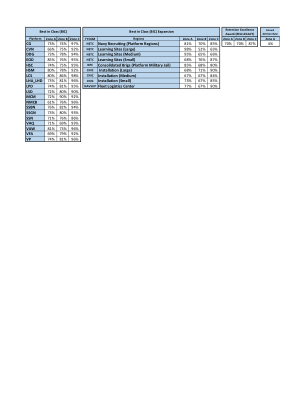
FY-24 REA_BIC 基准。......
平台 区域 A 区域 B 区域 C 区域 TYCOM 区域 区域 A 区域 B 区域 C 区域 A 区域 B 区域 C 区域 A CG 73% 74% 97% NETC 海军招募(平台区域) 81% 70% 85% 70% 70% 87% 4% CVN 66% 75% 92% NETC 学习站点(大型) 98% 52% 65% DDG 73% 78% 94% NETC 学习站点(中型) 95% 65% 66% EOD 85% 76% 95% NETC 学习站点(小型) 68% 76% 87% HSC 74% 75% 95% NPC 综合监狱(平台军事监狱) 85% 68% 80% HSM 80% 78% 92% CNIC 安装(大型) 68% 71% 90% LCS 80% 86% 98% CNIC 安装(中型) 67% 67% 84% LHA_LHD 73% 81% 96% CNIC 安装(小型) 73% 67% 85% LPD 74% 81% 95% NAVSUP 舰队物流中心 77% 67% 90% LSD 72% 80% 90% MCM 72% 90% 92% NMCB 61% 76% 96% SSBN 76% 82% 94% SSGN 73% 80% 93% SSN 71% 76% 86% VAQ 71% 69% 93% VAW 81% 73% 96%虚拟财务顾问 69% 79% 92% 虚拟财务顾问 74% 81% 96%

基准负荷谬误
澳大利亚悉尼 2052 电子邮件:m.diesendorf@unsw.edu.au 摘要 有人声称大规模发电系统不能以可再生能源为基础,因为后者被认为是“间歇性”能源,无法提供基载(24 小时)电力。本文表明,实际上存在多种可再生能源,它们具有不同类型的时间变化性。其中一些具有与煤炭类似的变化性(例如生物电、热岩地热、带热储存的太阳能热电),因此是基载。虽然大规模风力发电具有不同的变化性,但它可以借助少量峰值负荷发电厂(例如燃气轮机)取代一些基载煤炭。混合使用不同类型的可再生能源可以取代传统发电系统,并且同样可靠。简介 来自煤炭和核能行业以及 NIMBY(Not In My Backyard)组织的可再生能源反对者正在传播这样的谬论,即可再生能源无法提供基载电力来替代燃煤发电。 甚至政府部长和一些 ABC 记者也在宣传这种传统的“智慧”,尽管它是错误的。 其政治含义是,如果人们普遍相信这一谬论属实,可再生能源将永远只是一个小众市场,而无法发挥其成为一套主流能源供应技术的真正潜力。 驳斥这一谬论的关键逻辑步骤如下: • 无论有没有可再生能源,都不存在完全可靠的发电站或发电系统。 • 电网已经设计为能够应对需求和供应的变化。 为此,它们拥有不同类型的发电站(基载、中间负荷和峰值负荷)和备用发电站。 • 一些可再生电力来源(例如生物能源、太阳能热电和地热)具有与燃煤发电站相同的可变性,因此它们属于基载。它们可以集成到电网中而无需任何额外的备用,就像高效能源利用一样。 • 其他可再生电力来源(例如风能、不带储能装置的太阳能和径流式水力发电)具有与燃煤发电站不同的可变性,因此必须单独考虑。 • 风力发电提供了第三个可变性来源,可以集成到已经必须平衡可变传统供应和可变需求的系统中。