XiaoMi-AI文件搜索系统
World File Search System声纳
侧扫声纳标准操作程序手册
前言 本标准操作程序 (SOP) 文件旨在为 DMF 员工提供统一、标准化的指南和要求,以便他们进行、处理和生成侧扫声纳调查,用于各种目的,包括栖息地测绘和目标识别。本手册总结了当前的最佳实践,并利用了其他类似指导文件中的信息,包括 NOAA 水文调查现场程序手册 (2010 年 4 月)、欧洲海底栖息地测绘侧扫声纳推荐操作指南 (ROG) (2005 年 8 月),以及制造商指南中描述的参考设备程序。变更历史 本文档需要定期更新。有关手册的更改建议和其他意见应通过电子邮件发送至 steve.voss@state.ma.us 。

水下多静态声纳发展综述...
随着降噪技术的发展,潜艇的噪声越来越小,来自壁面或螺旋桨的声发射也越来越小,声发射减小,探测距离缩短,被动声纳越来越难以探测到潜艇,尤其在海上稳定时,被动声纳更是完全无用武之地。多基地声纳是一种可以弥补这一不足的有力技术。多基地声纳由声发射部件和分布在空间不同位置的声接收器等部分组成。声发射部件是向空间发射声能的声源,声接收器是用于收集来自不同位置的声反射的被动声纳。由于接收器静默地静止在任何可能的位置,敌方不可能找到接收器的确切位置,从而给敌方的对抗和规避带来困难。它具有掩蔽性好、抗干扰能力强、容易实现和优化、机动灵活、作用距离远、定位精度高等优点,非常适合于吊放声呐的探测应用和舰机联合潜艇探测应用。

自由浮动浮标声纳定位系统
海水中近表面声速 3'4 (1483 m s-r) 到频率计数器。门控周期由射频询问脉冲和声纳返回信号之间的持续时间设置。反射的声纳信号不会影响距离测量,因为它们的传播时间更长。 一对接收换能器安装在特殊形状的黄铜浮标下方,重 4 公斤 [图 3(a)],并通过一段尼龙绳悬挂在海面以下约 4 米处(图I )为浮标位置的三角测量计算提供了基线。通过比较换能器悬挂点之间的测量分离与换能器分离的声纳距离测量,确定此布置的基线稳定性在 * 0.I m 以内。在典型的实验情况下,即前后基线为 15 米,距离应答浮标 200 米,接收传感器的信噪比为 30 dB,通过三角测量计算和位置数据的统计处理,浮标位置可以在 * 0.5 米的精度范围内确定(第III B 节)。


提高声纳系统整体检测性能...
网络传感器系统中优化分布式检测的问题涉及许多设计方面,包括平衡漏检和误报概率以及通过适当的网络内信息融合管理通信资源。此外,还必须进行许多权衡,例如信息融合和传感器控制的计算要求与信息交换的通信要求之间的权衡。因此,最好通过共同考虑设计方面和权衡对整体系统性能的影响来做出整体系统设计决策。本文讨论了网络内融合和相关的网络算法,这些算法可提高多静态声纳应用的检测性能和能源效率。这是通过在场外传输之前交换和融合声纳浮标之间的联系来实现的。网络内融合利用成本较低的浮标间通信进行大部分数据通信,并通过仅报告具有足够相关性的多个浮标的检测来减少随机不相关的误报。场外接触传输的减少允许每个浮标的信号过量阈值降低,从而增加检测概率。我们通过分析和高保真声纳模拟证明了分布式网络融合的有效性。

全向多波束声纳监测 - IRD
摘要 通过中频全向多波束声纳获取的数据开发可用于渔业研究的原创性研究,但尽管大多数渔船和许多研究船上都配备了此类设备,但这种设备却很少使用。这是唯一一种用于实时监测船只或浮标周围水平全向平面内鱼群的系统。1996 年至 2001 年间,我们使用了两种标准全向声纳,并根据两种主要采样方案开发了利用其特定声学数据的新方法:“勘探”,包括捕鱼和搜索作业,以及“漂流”,如使用仪器浮标系统或固定船只。我们提出了一种从研究船或商业船上连续采集数据的完整方法,通过图片分析自动提取数据并采用数据处理方法。考虑两种数据分析情况:第一种是逐个鱼群进行分析,即“单群”模式;第二种是考虑声纳采样体积内检测到的所有鱼群,即“集群”模式。基本声纳信息分为五类,包括 24 个调查和声纳参数以及 55 个鱼群、集群和渔民行为描述符。我们回顾了这些类别的应用,并讨论了它们在渔业科学中的应用前景。如果声纳系统能够评估船只避让对鱼群生物量评估的影响,则简单的声纳回声积分过程无法提供准确的丰度估计。全向声纳数据可用于集体分析鱼群的游动速度、扩散和迁移方面的运动学、群体分裂和合并指标等聚集动力学、群体密度等集群的空间特征、二维结构和渔民行为。将这些数据整合到鱼群数据库中,包括多频回声测深仪和横向多波束 (3D) 声纳数据以及物种识别方法,将使我们能够全面了解鱼群行为,从而采用准确的渔业管理方法。

异构多静态声纳的应用 - ISIMA
在已发表的文献中,据我们所知,浮标放置问题(Tx、Rx、TxRx)从未得到直接解决。事实上,人们经常会进行简化,只考虑源和接收器。同样,也没有人研究过不同类型的传感器的异构情况,这会带来一系列问题,特别是由于不同声纳系统的性能差异以及传感器间可能存在的不兼容性(例如高频传感器和低频传感器之间)。最后但并非最不重要的是,海岸线的情况也从未得到明确解决。有关此主题的最新研究,请参阅 [3]、[4]、[5]、[6]。
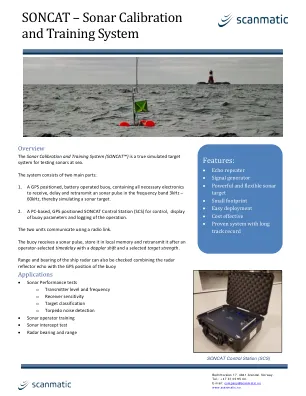
SONCAT – 声纳校准和训练系统
概述 声纳校准和训练系统 (SONCAT™) 是用于测试海上声纳的真实模拟目标系统。该系统由两个主要部分组成: 1. GPS 定位、电池供电的浮标,包含所有必要的电子设备,用于接收、延迟和重新发送 3kHz – 60kHz 频段的声纳脉冲,从而模拟声纳目标。 2. 基于 PC、GPS 定位的 SONCAT 控制站 (SCS),用于控制、显示浮标参数和记录操作。两个单元使用无线电链路进行通信。浮标接收声纳脉冲,将其存储在本地内存中,并在操作员选择的延时后以多普勒频移和选定的目标强度重新发送。还可以结合雷达反射器回波和浮标的 GPS 位置来检查船舶雷达的距离和方位

多基地声纳性能建模 - NTNU
持续时间较短(通常为 0.1 – 2.0 秒)。由于多普勒效应,移动目标将返回频移回波。因此,尽管有来自岩石和海山等其他反射体的不必要混响,仍可检测到目标。我们可以定义多普勒速度,如图 4 所示。相对频移等于多普勒速度除以声速。图 5 显示了在固定源/接收器对附近不同位置以 45 度方向移动的目标的多普勒速度。左侧和中间的图分别显示了单基地和双基地的情况。右侧的图显示了双基地设置的多普勒比单基地设置的多普勒更高的目标区域。黄色代表超过 2 kts,橙色代表 4 kts。虽然包括双基地接收的好处不是很大,但它可能对区分慢速移动目标和回波与静态地层很重要。

被动声纳中的到达方向估计...
................................................ . ……………………………… ...................................................... 39