XiaoMi-AI文件搜索系统
World File Search System外环
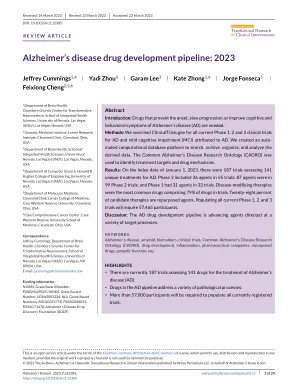
阿尔茨海默氏病药物开发管道:2023 -SBGG
图1在2023年治疗阿尔茨海默氏病的临床试验中(截至2023年1月1日的索引日期)。内环显示了3阶段的代理;中环由2期代理组成;外环提出了第1期治疗;绿色地区的代理商是生物制剂。紫色的药物是疾病改良的小分子。橙色地区的药物是有症状的药物,可解决认知增强或行为和神经精神症状。图标的形状显示了试验的人口;图标颜色显示了基于CADRO的代理类(“其他”类别包括在试验中具有三个或更少代理的Cadro类)。cadro,普通阿尔茨海默氏病研究本体论; TX,治疗。(图©J Cummings; M de la Flor,Phd,Illustrator)。

自适应控制容错自主载体... - SOAR
本文介绍了自适应控制方法在将自主固定翼飞机回收到航空母舰上的应用。所用的控制结构是模型参考自适应控制,在俯仰、滚转、偏航和空速轴上实施,以提供飞机的 6 个自由度控制。控制系统是为 NAVAIR ExJet 飞机模型开发的。控制器的结构包括一阶线性模型跟随器和自适应批评控制器。自适应用于增强自适应批评控制器产生的命令信号,使用以下方法:自适应偏差校正器、最佳控制修改和局部线性模型补偿。基于状态空间模型的逆控制器生成控制效应器命令。控制系统参考输入是旋转速率和空速,提供外环控制器来引导飞机到达着陆点。控制系统设计是通过使用基于标称误差、时间延迟裕度和着陆精度的指标来实现的。在标称、效应器故障和控制系统建模错误条件下评估控制系统。定义的控制系统能够在标称、故障和建模错误条件下提供所需的控制。

战略公路安全计划
2025-2029 年 SHSP 整合了美国交通部 (USDOT) 于 2022 年 1 月采用的一项概念,称为安全系统方法 (SSA)。尽管 SSA 在美国是一个相对较新的概念,但它是自 1990 年代以来在其他国家实施的安全策略。SSA 旨在促进安全文化,期望所有道路系统用户,无论何种模式,都将受到保护,并且责任由规划、建造、维护和使用交通系统的人共同承担。这包括规划人员和工程师以及监督影响道路安全的政策决策的民选官员。下图总结了 SSA,其中六 (6) 项原则显示在图的外环上,而内环描绘了五 (5) 个要素。这种方法的一个重要区别是,虽然零 (0) 死亡和重伤是最终目标,但重点应该放在消除导致重伤和死亡的事故上。

带稳定性增强器的无尾飞行器增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模(IBS)控制器,用于无尾飞机的轨迹控制,该控制器具有未知干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种限制虚拟控制输入速率和幅度的稳定性增强器(SE)。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,将激活第一层 SE 来修改轨迹跟踪误差;当虚拟控制输入超出边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。在 SE 的帮助下,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数自适应估计器,与 IBS 相结合,使控制器表现出良好的鲁棒性。最后,给出了两个仿真。第一次仿真表明系统对外部干扰和模型不确定性不敏感,第二次仿真证明了 SE 的有效性。
贝德明斯特 TFR 飞行提示 - FAA 安全
黄色表格列出了位于 30 海里外环内、但在 10 海里核心区之外的机场。您可以在 TFR 期间飞行,但必须提交 VFR 或 IFR 飞行计划并遵循一些简单的程序。TFR 内有四个机场设有运行控制塔(纽瓦克、考德威尔、莫里斯敦、特伦顿-默瑟)。请务必阅读他们在 TFR 期间可能实施的任何特殊程序(见下文)。对于每个机场,我们列出了空中交通管制设施、机场是否有 GCO 或放行频率(以及该频率是什么)、领取放行许可的电话号码以及离开/进入 TFR 的建议飞行路线。使用 GCO 或 CLNC DEL 频率(如果提供)。如果没有 GCO 或 CLNC DEL 频率,或者您使用通信无线电没有得到响应,请使用电话号码。建议的路线旨在将您带到 TFR 外最近的机场。
文章 带稳定性增强器的无尾飞机增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模 (IBS) 控制器,用于无尾飞机的轨迹控制,该飞机具有未知的干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种稳定性增强器 (SE),它限制了虚拟控制输入的速率和幅度。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,第一层 SE 将被激活以修改轨迹跟踪误差;当虚拟控制输入超过边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。借助 SE,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数的自适应估计器,与 IBS 一起,使控制器表现出出色的鲁棒性。最后,给出了两个仿真结果。第一次仿真表明系统对外界干扰和模型不确定性不敏感,第二次仿真证明了SE的有效性。

2021 年可持续发展报告
真正的概念之旅从第二章(第 25 页)开始,从我们可持续发展体系的核心开始:我们的 ESG 身份(第一环)。在这里,我们解释了关键的环境、社会和治理因素如何逐步融入我们的企业 DNA。第三章(第 53 页)描述了这一身份如何围绕自身形成一个创新的决策和运营模式:我们的 ESG 治理(第二环)。我们指的是将可持续发展战略与运营联系起来、使公司与利益相关者保持一致的机制。接下来的三章介绍了普睿司曼用于促进可持续发展的三个驱动力:我们的 ESG 抱负(三角形)。特别是,第四章“人、文化和组织”(第 87 页)重点关注我们的社会抱负,以确认普睿司曼文化和组织以人为本的特性。第五章“可持续创新和精益制造”(第 153 页)从技术方面描述了我们的创新抱负,这些技术使我们成为衡量可持续产品的基准。第六章“扩展价值链”(第 153 页)带领我们审视普睿司曼在价值链上游和下游的可持续领导力:我们的 ESG 价值(外环)。这凸显了普睿司曼作为冠军的角色,能够为客户和利益相关者维持和促进可持续价值的创造。

综合预览和非线性控制律设计舰载机飞行控制器
摘要:本文提出了一种考虑复杂舰船运动和风环境的舰载机自动着舰控制律,具体为预瞄控制与自适应非线性控制的综合策略。首先,在姿态控制环中采用增量非线性反步控制律,以提高飞机的抗干扰能力。其次,为提高恶劣海况下的下滑道跟踪性能,对舰载机运动进行预测,并将预测的运动引入最优预瞄控制制导律中,以补偿舰载机运动带来的影响。然而,预瞄控制本质上是一种最优控制律,需要建立状态空间模型,因此内环与外环控制的综合并不是那么简单。因此,需要对姿态-高度高阶系统模型进行低阶等效拟合,此外,还需要为低阶等效系统设计状态观测器,为着舰控制器提供所需状态。最后,为验证所提方法,以无人无尾机模型在不同海况下执行自动着舰任务,结果表明,自动着舰系统即使在恶劣海况下也能保证令人满意的着舰精度和成功率。

增量反步法实现稳健非线性飞行控制
摘要 本文提出了一种稳健的非线性飞行控制策略,该策略基于增量控制行为和反步设计方法相结合的结果,适用于由严格反馈(级联)非线性系统描述的飞行器。该方法称为增量反步,使用执行器状态和加速度估计的反馈来设计控制行为的增量。与反步相结合,所提出的方法可以逐步稳定或跟踪非线性系统的外环控制变量,同时考虑较大的模型和参数不确定性以及外部扰动和气动建模误差等不良因素。这一结果大大降低了对建模飞机系统的依赖,克服了传统的基于模型的飞行控制策略的主要稳健性缺陷。这种建议的方法意味着在动态模型的准确知识和飞行器传感器和执行器的准确知识之间进行权衡,这使得它比基于识别或模型的自适应控制架构更适合实际应用。针对一个简单的飞行控制示例,仿真结果验证了所提出的控制器在气动不确定性条件下相对于标准反步方法的跟踪能力和卓越的鲁棒性。

伦敦市中心交通拥堵收费影响监测
2. 中心区:交通模式……………………………………………… 17 2.1 简介……………………………………………………………….. 17 2.2 2006 年的发展情况…………………………………………... 17 2.3 以往报告的主要发现……………………………………... 17 2.4 2006 年的主要发现………………………………………………... 19 2.5 进入收费区的交通……………………………………………... 19 2.6 离开收费区的交通………………………………………... 23 2.7 在收费区内流通的交通……………………………... 25 2.8 内环路上的交通……………………………………... 30 2.9 接近收费区的放射状交通……………………………... 32 2.10 选定地方道路上的交通状况………………………………………….. 33 2.11 其他指标………………………………………………………… 34 2.12 要点总结………………………………………………………. 34 3. 中心区:交通拥堵…………………………………………………… 35 3.1 简介…………………………………………………………………… 35 3.2 2006 年的发展情况……………………………………………………... 35 3.3 以往报告的主要发现……………………………………………………... 35 3.4 伦敦中心收费区内的交通拥堵情况……………………………………... 37 3.5 内环路的交通拥堵情况………………………………………………... 40 3.6 靠近伦敦中心收费区的放射状路线的交通拥堵情况………………………………………………... 41 3.7 伦敦内环主干道的交通拥堵情况……………………………………... 42 3.8 伦敦外环主干道的交通拥堵情况……………………………………... 43 3.9 交通拥堵与交通量的关系……………………………………... 44 3.10 近期研究总结趋势………………………………………… 45 3.11 解释……………………………………………………………… 46 3.12 分析………………………………………………………………………. 48