XiaoMi-AI文件搜索系统
World File Search System外部干扰

纳米卫星望远镜指向
准确稳定的航天器指向是许多天文观测的要求。特别挑战纳米卫星,因为表面积不利 - 质量比和甚至最小的态度控制系统所需的量。这项工作探讨了无执行器精度或执行器引起的干扰(例如抖动)不受限制的机构中对天体物理态度知识和控制的局限性。对原型6U立方体上的外部干扰进行了建模,并根据可用体积内的望远镜的可用恒星量和掌握限制感测知识计算。使用模型预测的控制方案集成了这些输入。对于1 Hz的简单测试用例,具有85毫米望远镜和单个11级恒星,可实现的身体指向预计为0.39弧秒。对于更一般的限制,可以整合可用的星光,可实现的态度感应大约为1毫米秒,这导致了应用控制模型后的20 milliarcseconds的预测身体指向精度。这些结果表明,在达到天体物理和环境限制之前,态度传感和控制系统的重大空间。

国家-Hracan- 中的政策政策
数据安全是我们的重点。除其他外,我们使用了最新的技术和组织安全措施,目前实施了嵌入式安全性的认可和测试的机制和标准。我们在开发新功能时扩展了安全措施,以便实现当前的数据保护法规,并可以通过最新的技术和组织措施(通过最新的技术和组织措施)保证车辆中相应的数据安全和个人数据保护。车辆和兰博基尼后端之间的所有连接都是私人,机密,积分和安全的。通过利用HTTP,通过私人APN建立连接并实施基于令牌的身份验证,车辆和后台之间的通信具有多层安全性。https对车辆和后端之间交换的数据进行加密,从而使其免受拦截或未经授权的各方篡改。私有APN连接确保通信发生在专用,安全的网络中,从而最大程度地减少了外部干扰的风险。此外,采用基于令牌的身份验证机制,通过需要有效的令牌访问来增加额外的保护,从而挫败未经授权的访问尝试。

纳米卫星望远镜指向的实际限制
精确而稳定的航天器指向是许多天文观测的必要条件。指向对纳米卫星尤其具有挑战性,因为即使是最小的姿态控制系统也需要不利的表面积与质量比和成比例的大体积。这项工作探索了在不受执行器精度或执行器引起的抖动等干扰限制的状态下天体物理姿态知识和控制的局限性。对原型 6U 立方体卫星上的外部干扰进行了建模,并根据可用恒星通量和可用体积内望远镜的抓取来计算极限传感知识。这些输入使用模型预测控制方案进行集成。对于 1 Hz 的简单测试案例,使用 85 毫米望远镜和一颗 11 等星,可实现的天体指向预计为 0.39 角秒。对于更一般的限制,结合可用的星光,可实现的姿态传感约为 1 毫角秒,应用控制模型后,可预测的物体指向精度为 20 毫角秒。这些结果表明,在达到天体物理和环境极限之前,姿态传感和控制系统还有很大的改进空间。
文章:在模拟动态环境中探索自适应人机协作选项的架构框架
摘要:随着系统预期运行环境的日益复杂,自适应人机协作 (HMT) 已成为一个关键的研究领域。虽然心理学和培训文献对人类团队进行了广泛的研究,人工智能研究界也对代理团队进行了研究,但对 HMT 的研究投入相对较新,并受到多项技术进步的推动,例如电生理传感器、认知建模、机器学习和自适应/可适应人机系统。本文提出了一个架构框架,用于研究各种模拟操作环境中的 HMT 选项,包括应对系统故障和外部干扰。本文特别讨论了新技术为机器带来的新角色,并提供了有关自适应人机协作的关键见解。着陆飞机周边安全被用作自适应网络-物理-人系统 (CPHS) 的一个说明性示例。此示例用于说明如何使用 HMT 框架来识别此场景中涉及的不同人机角色。该框架独立于各个领域,可应用于国防和民用自适应 HMT。本文最后提出了推进 HMT 最新技术的建议。
RL2AC:基于增强学习的快速在线自适应控制机器人强大的运动
摘要 - 动态快速适应是使动物及时,正确调整其运动的基本帽质体之一,从而对不可预测的变化做出了反应。在不预测的环境中工作时,这种功能对于四倍的机器人也是必不可少的。虽然增强学习(RL)在运动控制方面取得了重大进展,但对模型不确定性的快速适应仍然是一个挑战。在本文中,我们试图确定运动RL政策背后的控制机制,我们从中提出了一种新的基于RL的快速在线自适应控制(RL2AC)算法,以互补地将RL策略和自适应控制结合在一起。RL2AC以1000Hz的频率运行,而无需使用RL同时训练。它具有针对外部干扰或SIM真实间隙的强大能力,从而实现了强大的运动,这是通过从新颖的自适应控制器中得出的适当扭矩补偿来实现的。各种模拟和实验证明了提出的RL2AC针对重载重的有效性,干扰作用在一条腿上,侧向扭矩,SIM卡到真实的间隙和各种地形。
MRI 3T机器
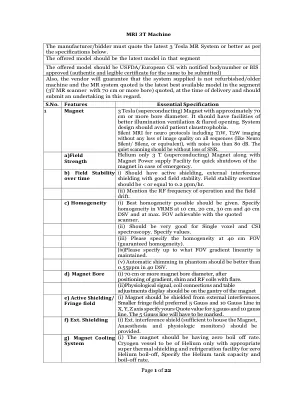
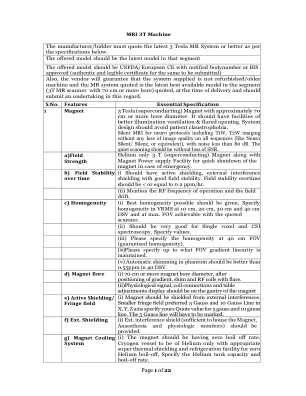
i)应具有具有良好场地稳定性的主动屏蔽,外部干扰屏蔽。场稳定的加班应为<或等于0.2 ppm/hr。(ii)提及RF操作频率和场漂移。c)同质性(i)应提供最佳同质性。在10 cm,20 cm,30 cm和40 cm DSV的VRMS中指定同质性,最大。可以用引用的扫描仪来实现。(ii)对于单素体素和CSI光谱应该非常好。指定值。(iii)请在40 cm FOV(保证同质性)处指定同质性。(iv)请指定保持哪些FOV梯度线性。(v)幻影中的自动弹跳应优于40 dsv中的0.55ppm。d)磁铁孔(i)70厘米或更多的磁铁孔直径,梯度,垫片和射频线圈用耀斑定位后。(ii)生理信号,线圈连接和表调整应显示在磁铁的龙门上e)主动屏蔽/条纹场 div>
MRI 3T机器
i)应具有具有良好场地稳定性的主动屏蔽,外部干扰屏蔽。场稳定的加班应为<或等于0.2 ppm/hr。(ii)提及RF操作频率和场漂移。c)同质性(i)应提供最佳同质性。在10 cm,20 cm,30 cm和40 cm DSV的VRMS中指定同质性,最大。可以用引用的扫描仪来实现。(ii)对于单素体素和CSI光谱应该非常好。指定值。(iii)请在40 cm FOV(保证同质性)处指定同质性。(iv)请指定保持哪些FOV梯度线性。(v)幻影中的自动弹跳应优于40 dsv中的0.55ppm。d)磁铁孔(i)70厘米或更多的磁铁孔直径,梯度,垫片和射频线圈用耀斑定位后。(ii)生理信号,线圈连接和表调整应显示在磁铁的龙门上e)主动屏蔽/条纹场 div>

有限的时间前馈脱钩和精确的DC微电网朝向大信号稳定性
摘要 - 这项研究是通过考虑一个新兴的实际问题来开始的,即DC微电网应在喂食电阻载荷和恒定功率载荷(CPLS)时能够具有较大信号稳定性的操作。要更具体,应在存在大量综合可再生能源和CPL,系统内部不确定性,外部干扰,耦合相互作用以及其他不利影响的情况下确保稳定性。从控制的角度来看,我们有意提出了一个通用解决方案,以实现互连系统的确切分散的跟踪控制任务。首先,提出了一种替代的有限时间馈电机制,该机制与反馈统治或递归取消过程基本不同。其次,可以从系统信息中直接构建一个comite控制器,因为它与稳定性分析相脱。提议的设计框架的一个主要优点是它降低了设计的复杂性,因此促进了实际实现。作为直接应用,为自主DC微电网系统构建了一个简单的分散复合控制器。数值模拟和实验比较结果都表明,在各种不同情况下,DC微电网实现了大信号稳定性。

挑战在恢复和振动 - 对照组合的挑战 -
1)基于地球的天文学:随着分段镜的出现,望远镜技术的范式发生了变化(Keck,1993),这似乎使非常大的望远镜可扩展到无限,尤其是适应性光学的成功,尤其是由于大气湍流而造成的blur show doce night> doce show a doce show> <[Gilmozzi]。几个项目将在这十年中看到第一光:TMT(TMT(30 m的主镜M1)和E-ELT(M1直径最初预见到42 m,最近降低至39 m),图1。请注意,允许良好图像质量的波前误差仅与观察到的波长有关(λ /14),从而使比率ε=精度 /大小明显小于任何现有项目。这些结构的大小使它们对外部干扰越来越敏感,例如由于地球旋转和风而引起的重力矢量的变化;这需要具有较大带宽的控制系统,与固有频率降低和轻度阻尼相冲突。量表效应分析[preumont]表明,这些复杂的光学机能系统的行为受到控制结构相互作用的威胁,控制结构相互作用迄今为止微不足道或至少无法控制[Aubrun]。

用于在轨服务的具有柔性附件的旋转漂浮空间机器人的鲁棒控制
线性和角航天器动力学。已经针对捕获应用进行了研究,因为潜在的翻滚目标需要经过调整的机械手方法。通过 Giordano 等人 (2018) 提出的工作空间调整策略或 Giordano 等人 (2019) 同时控制全局质心和航天器姿态,已经研究了如何有效使用推进器来补偿机械手运动。同样,当仅控制机械手时,Pisculli 等人 (2015) 开发了反应零空间控制,以减少机械手和航天器底座之间的相互作用。还可以注意到没有考虑底座执行器的情况。更一般地说,轨迹规划被认为可以减少机械手运动和/或外部干扰对底座的影响,至少对于无奇点轨迹而言。Rybus 等人采用了非线性模型预测控制。 (2017) 确保机械手实现优化轨迹,最大限度地减少机械手对卫星的干扰,同样在捕获接近阶段,Lu 和 Yang (2020) 研究了笛卡尔轨迹规划,以最大限度地减少姿态干扰,Seddaoui 和 Saaj (2019) 提出了一种用于燃料消耗优化的无碰撞路径和无奇点路径的通用轨迹规划,同时采用 H ∞ 控制和前馈补偿处理内部和外部扰动。