XiaoMi-AI文件搜索系统
World File Search System多任务的

利用人工智能实现多任务的机器人
2. 文献综述 1. 根据陈志豪等人[1]的论述,它为智能移动应用(例如道路交通和铁路气候)实现了对象识别、定位和监控框架。首先在两种深度学习方法中进行对象检测和跟踪方法:You Only Look Once (YOLO) V3 和单次检测器 (SSD)。 2. Zhong-Qiu Zhao 等人[2]的论述,本文介绍了一种专注于对象检测框架的深度学习分析。在卷积神经网络(CNN)的背景下解决了通用对象检测架构,并进行了一些修改和有用的技巧以提高检测效率。 3. Licheng Jiao 等人[3]的论述,本文重点介绍了用于检测任务的深度学习网络的快速发展,以及对象检测器的效率得到了大大提高。 4. Yakup Demir2 等人[4]的论述,涉及在真实驾驶环境中对周围物体进行可靠和准确的检测和识别的自动驾驶。虽然已经提出了许多用于物体检测的算法,但并非所有算法都足够稳健,可以检测和识别被遮挡或截断的物体。本文提出了一种基于卷积神经网络 (CNN) 和支持向量机 (SVM) 的混合局部多系统 (LM-CNNSVM),因为它具有强大的提取能力和稳健的分类特性。5. Mukesh Tiwari 编辑 [5] 讨论了由于物体运动的日常变化和场景大小的变化、遮挡、外观变化以及自我运动和照明的变化,物体的识别和跟踪是重要的研究领域。具体而言,特征选择是跟踪物体的重要组成部分。
基于进化多任务的混合脑机接口系统中通道选择的多目标优化算法
混合模态脑机接口 (BCI) 结合了运动想象 (MI) 生物信号和稳态视觉诱发电位 (SSVEP),在神经工程研究领域引起了广泛关注。在实际应用中,通道数量应尽可能少。然而,最近关于通道选择的大部分研究仅关注分类任务的性能或设备控制的有效性。很少有研究同时对 MI 和 SSVEP 分类任务进行通道选择。在本文中,提出了一种基于多任务的多目标进化算法 (EMMOA),以同时为这两个分类任务选择合适的通道。此外,还引入了一个两阶段框架来平衡所提算法中选定通道的数量和分类准确率。实验结果验证了多目标优化方法对于混合 BCI 任务通道选择的可行性。

2022 年经济影响报告 - 小石城空军基地
1952 年,当地社区筹集了 80 多万美元,购买并捐赠了小石城空军基地如今所在的 6,100 英亩土地。自 1955 年 10 月首次开放以来,基地与社区一直保持着繁荣的共生关系。随着侦察、战略轰炸、核导弹和战术空运等众多任务的变更,社区的支持确保了空军人员始终得到支持。在坚定不移的援助下,基地将继续取得成功,这在很大程度上要归功于当地公民。

赫克民族之家 - 经济影响声明
1952 年,当地社区筹集了 80 多万美元,购买并捐赠了小石城空军基地如今所在的 6,100 英亩土地。自 1955 年 10 月首次开放以来,基地与社区一直保持着繁荣的共生关系。随着侦察、战略轰炸、核导弹和战术空运等众多任务的变更,社区的支持确保了空军人员始终得到支持。在坚定不移的援助下,基地将继续取得成功,这在很大程度上要归功于当地公民。

自动语音识别的多阶段多模式预训练
机器学习的最新进展表明,与随机初始化的模型相比,多模式的预训练可以改善自动语音识别(ASR)性能,即使模型在Uni-Modal-Modal任务上进行了微调。ASR任务的现有多模式预训练方法主要集中在单级预训练上,其中单个无监督任务用于预训练,然后在下游任务上进行微调。在这项工作中,我们介绍了一种新颖的方法,该方法将多模式和多任务的无监督预训练与基于翻译的监督中期训练方法相结合。我们从经验上证明,这种多阶段方法会导致相对单词错误率(WER)在LibrisPeech和Superb上的基线比基线高达38.45%的改善。此外,我们分享了选择预训练方法和数据集的几个重要发现。
监督投票官(SVO)
•与选民,候选人和党代表(审查员),候选人和媒体进行互动中的机智和外交。SVO必须具备出色的人际交往能力,才能为选民和选举官员提供明确的指导和帮助•以前的选举活动经验将是一个明显的优势•提高高达50磅的能力。到反高度•基本的算术和分析能力•良好的关注细节•能够以清晰而清晰的手写正确完成纸张形式•能够在出现的能力上平静而有效地理解,合理化和解决情况•能够长时间工作的能力•在长时间的时间内工作•多任务的能力•多任务处理•访问手机•SVOS•SVOS可以访问设备和投票设备。
AMD Ryzen™AI Pro Protageor领导和TCO BEANTY
所选系统和我们在以下页面上展示的性能测试将使我们能够显示出在开放页面上突出显示我们的价值计算的步骤。我们将首先查看重型单线和多线程工作负载的一般平台和处理器性能,显示通用办公室生产力基准,并突出关键内容创建和图形结果。接下来,我们分析多任务的方案,同时运行多个应用程序时,请查看系统性能,这是商业用户的典型环境。最后,我们使用该多任务数据来构建一个时间价值计算,强调已节省的员工时间并节省企业成本。

太空手册 - 太空战士指南,第一卷
沙漠风暴行动大大提高了太空系统的实用性,为我们提供了新的发展基础。据 Thomas S. Moorman, Jr. 中将称,“我们在波斯湾证明了我们的价值,未来我们将通过继续利用太空系统提高战斗力来证明我们的价值。”太空为导航、通信、气象和情报等所有服务提供了关键支持。在《空军杂志》的一篇令人鼓舞的文章中,James Canan 写道:“在军事圈,太空正在失去其高调的研发光环,并呈现出脚踏实地的作战面貌。作战指挥官很快就开始青睐太空系统。”太空系统为战术部队提供的信息非常受欢迎,并改变了我们规划许多任务的方式。我们正在发挥作用!这种差异是需要发生的事情的一个例子,但我们也必须改进我们的教育过程。
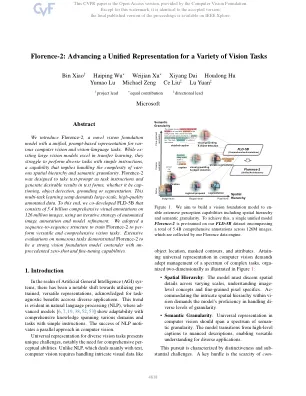
佛罗伦萨-2:推进各种视觉任务的统一代表
我们介绍了Florence-2,这是一个新型视觉基础模型,具有统一的,及时的代表,用于量级计算机视觉和视觉语言任务。在转移学习方面表现出色时,他们努力通过简单的说明执行各种任务,这意味着处理各种空间层次结构和语义粒度的复杂性。Florence-2旨在将文本推出作为任务说明,并以文本形式产生理想的结果,无论是限制,对象检测,接地还是分割。这种多任务学习设置需要大规模的高质量注释数据。为此,我们使用自动化图像注释和改进的迭代策略,共同开发了1.26亿张图像的FLD-5B。我们采用了一个序列结构,以训练佛罗伦萨-2,以执行多功能和全面的视觉任务。对众多任务的广泛评估表明,佛罗伦萨-2是具有未曾预性零击和微调功能的强大愿景基础模型竞争者。