机构名称:
¥ 1.0
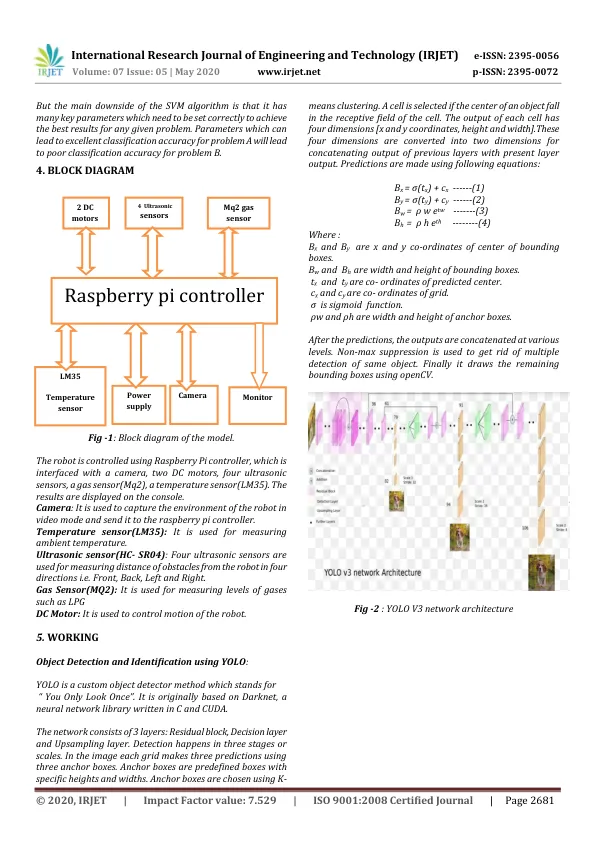
2. 文献综述 1. 根据陈志豪等人[1]的论述,它为智能移动应用(例如道路交通和铁路气候)实现了对象识别、定位和监控框架。首先在两种深度学习方法中进行对象检测和跟踪方法:You Only Look Once (YOLO) V3 和单次检测器 (SSD)。 2. Zhong-Qiu Zhao 等人[2]的论述,本文介绍了一种专注于对象检测框架的深度学习分析。在卷积神经网络(CNN)的背景下解决了通用对象检测架构,并进行了一些修改和有用的技巧以提高检测效率。 3. Licheng Jiao 等人[3]的论述,本文重点介绍了用于检测任务的深度学习网络的快速发展,以及对象检测器的效率得到了大大提高。 4. Yakup Demir2 等人[4]的论述,涉及在真实驾驶环境中对周围物体进行可靠和准确的检测和识别的自动驾驶。虽然已经提出了许多用于物体检测的算法,但并非所有算法都足够稳健,可以检测和识别被遮挡或截断的物体。本文提出了一种基于卷积神经网络 (CNN) 和支持向量机 (SVM) 的混合局部多系统 (LM-CNNSVM),因为它具有强大的提取能力和稳健的分类特性。5. Mukesh Tiwari 编辑 [5] 讨论了由于物体运动的日常变化和场景大小的变化、遮挡、外观变化以及自我运动和照明的变化,物体的识别和跟踪是重要的研究领域。具体而言,特征选择是跟踪物体的重要组成部分。
利用人工智能实现多任务的机器人
主要关键词
相关文件推荐