XiaoMi-AI文件搜索系统
World File Search System多波束
swphc16-07b - 国际水文组织
[ 描述自上次 RHC 会议以来与以下项目相关的调查中发生的任何重大进展 ] a) 新调查的覆盖范围:新调查 Denarau 和 Malolo 岛(新海图 F-10) b) 新技术和/或设备多波束能力(R2sonic 2020 和 2024)和 Norbit 系统 c) 新船舶 RFNS Kacau 和 SMB Ika Vuka d) 遇到的问题有关更新 IHO 出版物 P-5(年鉴)和 C-55(全球水文测量和制图现状)的调查详细信息分别提交于附件 A 和 B。

河口底栖测绘数据的空间分析与可视化工具与技术
图 1。用于在 GIS 中表示底栖栖息地特征的矢量数据模型示例图 2。用于在 GIS 中表示底栖栖息地特征的栅格数据模型示例图 3。栖息地规模、传感器分辨率、分析/可视化技术与底栖栖息地测绘资金之间的关系图 4。传感器的相对尺度和底栖栖息地测绘分析图 5。多波束测深数据显示数据分辨率对在不同空间尺度上可视化底栖栖息地的影响图 6。底栖栖息地数据的数据显示、数据分析和数据集成之间的差异示例图 7。显示了显示和分析测深数据的不同技术的图表。转换为栅格 (b) 的水深点数据 (a) 可以查询以获取其他数据,例如深度轮廓 (c) 图 8。图示说明从侧扫声纳马赛克中划定地质基质,随后使用更高分辨率的 SPI 样本划定子栖息地 图 9。侧扫和多波束声纳数据的比较显示数据连续性的差异 图 10。Kostylev 等人的底栖栖息地测绘示例。2001 图 11。不同点插值技术的比较 图 12。使用平面视图摄影进行鳗草监测的示例数据收集和分析方法。
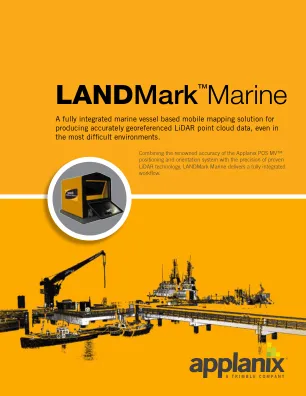
LANDMarkTMMarine - Applanix
Applanix POS MV ™ 系统是一种 GNSS 辅助惯性导航系统,可提供一整套位置和方向测量。POS MV 于 1996 年投放全球市场,是一种紧密耦合系统,采用 Applanix 独特的惯性辅助实时运动 (IARTK) 技术。POS MV 具有高数据更新率,可提供完整的六自由度位置和方向解决方案。它设计用于多波束声纳系统,可遵守 IHO(国际水文测量局)标准,在所有动态条件下声纳扫描带宽度大于 ± 75 度。POS MV 为用户提供最高精度的海洋应用运动中测量。

包机和探险旅行
用于数据收集、观察和协作任务执行的卓越平台 Antipodes 拥有两个 1.47 米(58 英寸)半球形丙烯酸圆顶,为深海探险期间的直接科学观察和拍摄提供卓越的视野。她的容量允许来自多个学科的船员实时协作,因此检查不仅限于操作员指定的感兴趣区域,而是由船上人员的共识决定,从而允许不同的视角。得益于其全套导航和声纳设备,Antipodes 还能够在低能见度和多变的天气条件下全天候运行,使其船员能够及时、有效地对海洋环境进行调查。除了标准的导航和采样设备套件(包括机械臂、多波束声纳和高清成像功能)外,Antipodes 还具有完全可配置性,可满足研究和商业界最复杂的数据收集需求。

用于清洁大量水深测量数据的系统
最近,用于绘制海底地图的大量数据采集技术已经面世并被采用。加拿大使用的技术包括机载激光测深系统,例如由加拿大开发的由 Optech Systems 开发的 LARSEN 500 系统及其后继系统 SHOALS 系统(深度能力达 30 米);扫描系统,例如由丹麦开发的 Navitronics 系统,该系统安装在由加拿大水文服务局、加拿大公共工程部和加拿大海岸警卫队运营的几艘船上(深度能力达 100 米);以及条带测绘系统,例如由挪威开发的 Simrad EM100 多波束测深仪(深度能力达 300 米),该系统在 CSS MATTHEW 和 CSS CREED 上使用,还安装在纽芬兰 Geo Resources Inc 的遥控潜艇平台 Dolphin 的船体上。这些系统

GSTAR 宣传册 - 洛克希德马丁
GPS 接收器集成和向后兼容性 GPS 接收器在任何 AJ 解决方案的有效性中都起着至关重要的作用。GSTAR 提供多种集成选项:• 与任何标准 GPS 接收器兼容的 RF 接口 • 与外部数字接收器的数字多波束接口;此选项用于基于 EGI 的平台 专为增长而设计 • 基于 M 代码和 SAASM 的 EGI 兼容 AEU • 用于波束成形的开放数字接口 • 基于 FPGA 的架构可适应未来威胁 • 与主要政府和行业合作伙伴一起推进 AJ-GPS 经过验证的设计 GSTAR 系列产品的变体已成功针对各种威胁场景进行了测试。我们已经在众多模拟领域证明了我们的设计能够抵御威胁,包括赖特帕特森空军基地、天线波前模拟器和霍洛曼空军基地的飞行测试。

机器人与人工智能前沿领域
- 从不同传感器领域(光学摄像机、激光雷达、声纳、多波束、事件摄像机、高光谱传感)的低质量和/或稀缺数据中进行稳健识别。- 在高度动态环境或长期部署机器人系统中进行稳健识别。- 图像/视频恢复和增强,以消除由于低照度、色彩失真、恶劣天气、能见度差而导致的退化。- 新型传感器开发或传感器融合和校准技术,实现稳健的视觉感知。- 模拟环境和持续系统集成,即合成数据生成、模拟到现实世界的转换、硬件在环。- 视觉系统的低质量和稀缺数据挖掘、增强和处理方法。- 上述任何主题中的深度学习实践和机器学习管道。- 经过现场试验和部署及数据管理最佳实践的大量测试系统。- 对抗性和挑战性环境下计算机视觉算法和应用调查。- 上述任何一项在基于视觉的定位、配准、映射、建模、姿势估计和其他领域的应用。
文章 用于浅水测深评估的创新海上无人系统和卫星解决方案
摘要:浅水测深是土木工程、港口监测和军事行动等各个领域的重要研究课题。本研究介绍了几种使用海上无人系统 (MUS) 评估浅水测深的方法,该系统集成了先进和创新的传感器,例如光探测和测距 (LiDAR) 和多波束回声测深仪 (MBES)。此外,本研究全面描述了同一地理区域内的卫星测深 (SDB) 技术。每种技术都从其实施和结果数据方面进行了全面概述,然后对其准确性、精确度、快速性和操作效率进行了分析比较。在 MUS 调查之前,使用传统方法进行的水深参考调查以及所有方法之间的交叉比较来评估方法的准确性和精确度。在对调查方法的每次评估中,都会进行全面的评估,解释每种方法的优点和局限性,从而使读者能够全面了解这些方法的有效性和适用性。该实验是作为“使用海上无人系统 23 的机器人实验和原型设计”(REPMUS23)多国演习的一部分进行的,该演习是快速环境评估 (REA) 实验的一部分。
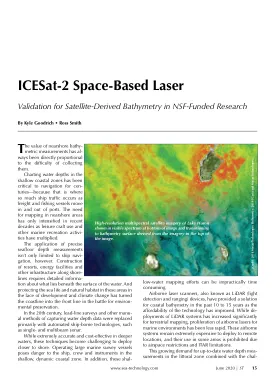
ICESat-2 太空激光器
近岸水深测量的价值始终与采集它们的难度成正比。几个世纪以来,绘制浅水沿岸区域的水深图对航行一直至关重要,因为那里是货船和渔船进出港口等船舶交通繁忙的地方。近几十年来,随着休闲船只的使用和其他海上娱乐活动的增加,近岸区域测绘的需求也愈加强烈。然而,精确的海床深度测量的应用并不仅限于船舶航行。海岸线上度假村、能源设施和其他基础设施的建设需要关于水面下情况的详细信息。面对发展和气候变化,保护这些地区的海洋生物和自然栖息地已经将海岸线变成了环境保护的前线。在 20 世纪,铅线测量和其他获取水深数据的手动方法主要被自动船载技术(如单波束和多波束声纳)所取代。虽然这些技术在较深的水域中非常准确且具有成本效益,但部署在靠近海岸的地方却具有挑战性。在浅水、动态沿海地区操作大型海洋测量船对船舶、船员和仪器构成危险。此外,这些浅水
用于浅水测深评估的创新海上无人系统和卫星解决方案
摘要:浅水测深是土木工程、港口监测和军事行动等各个领域关注的重点课题。本研究介绍了几种使用集成了光探测和测距 (LiDAR) 和多波束回声测深仪 (MBES) 等先进创新传感器的海上无人系统 (MUS) 评估浅水测深的方法。此外,本研究全面描述了同一地理区域内的卫星测深 (SDB) 技术。详细介绍了每种技术的实施和所得数据,然后对其准确性、精确度、快速性和运行效率进行了分析比较。在 MUS 调查之前,使用传统方法进行的水深参考调查以及所有方法之间的交叉比较来评估方法的准确性和精确度。在对每一种调查方法进行评估时,都会进行全面的评估,解释每种方法的优点和局限性,从而使读者能够全面了解这些方法的有效性和适用性。该实验是使用海上无人系统 23 进行机器人实验和原型设计(REPMUS23)多国演习的一部分,而该演习又是快速环境评估 (REA) 实验的一部分。