XiaoMi-AI文件搜索系统
World File Search System大满贯

合成声纳图像模拟具有各种海床条件的自动目标识别
在域内领域内的沟通环境有限,因此需要使用自主权和自动化目标识别(ATR),以便允许无人车辆在没有操作员的情况下做出可行的决定[1] - [3]。水下环境特性使声传感器成为开发自主系统的最重要的传感器工具,如车辆协调[4]和水下大满贯[5]所示。但是,相同的荒凉环境使得用于机器学习算法的大型数据集的收集变得难以正确训练基于机器学习的算法。因此,在基于侧扫声纳图像运行的训练自主系统中使用了具有声学精确的数据[6] - [9]。生成模拟数据的一种方法是使用基于物理学的声学建模,以模拟声音传播和原始声纳数据收集[10],[11]。这具有捕获声纳数据的低级细微差别以生成声纳图像的好处,但这些模型通常很复杂且计算昂贵。另一种方法是近似将
![arxiv:2403.17346v2 [CS.CV] 2 Sep 2024](/simg/9\9944fb79975bd27f5343cf3e1c65012cdfd8fc49.webp)
arxiv:2403.17346v2 [CS.CV] 2 Sep 2024
用于相机轨迹估计,同时定位和映射(SLAM)[9]已被广泛用于机器人技术中。但是,在我们的背景下,传统的大满贯面临两个关键挑战。首先,SLAM假设一个静态环境,而我们的视频包含移动人体,这减少了估计值的认可。其次,单眼猛击只能恢复摄像头轨迹,最多可恢复到库尺度。为代表公制世界框架中的相机运动,我们需要估算一个缩放因素。最近的研究建议从观察到的人类运动中推断摄像机运动的规模[22,95]。特别是在猛击之后,这些方法共同优化了人类的姿势和摄像头尺度,因此人的位移与学习的运动模型相匹配。但是,由于运动模型是从Studio MoCap数据中学到的,因此预测的位移不会推广到现实世界中的复杂性。因此,他们难以恢复复杂而远程的轨迹。

工程学院
工程学院(选项:工程企业家学院的工程学院的任何专业)工程学院涵盖了各种各样的工程领域,并促进了学术协同作用。学院有八个学术单位,在各种工程学科中提供了学术课程。除了学生选择直接进入学院各个部门的其他路线外,JS1217选项还可以免费选择学生。通过JS1217入院后,学生可以在开始学习的第一年之前选择大学的任何专业。他们将保证实习和海外交流的机会。除了扮演自己的专业之外,还将要求学生参加一个名为“工程企业家精神的未成年人”的未成年人。这个次要的旨在向工程学生介绍基于技术的工程企业家精神的基础,以帮助学生培养企业家的心态,创新和系统思维,并扩大其多学科观点。以及在大满贯赛中学到的知识和技能,这项未成年人将为工程毕业生到工程师到企业家,专利律师或技术商业化代理商的替代职业道路。

ru-slam:稳健的深度学习视觉同时定位和映射(SLAM)系统,用于弱质地的水下环境
摘要:准确且健壮的同时定位和映射(SLAM)系统对于自动水下车辆(AUV)至关重要,可以在未知环境中执行任务。然而,直接将基于深度学习的SLAM方法应用于水下环境会带来挑战,这是由于纹理较弱,图像退化以及无法准确注释关键点的挑战。在本文中,提出了强大的深入学习视觉大满贯系统。首先,一个名为UWNET的功能生成器旨在解决弱纹理和图像降解问题,并提取更准确的关键点功能及其描述符。此外,基于改进的水下成像物理模型以自我监督的方式训练网络的知识蒸馏概念。最后,将UWNET集成到ORB-SLAM3中以替换传统的特征提取器。提取的本地和全局特征分别用于特征跟踪和闭环检测模块。公共数据集和自收集的池数据集的实验结果验证了所提出的系统在复杂方案中保持高精度和鲁棒性。

在线确定腿部运动学
摘要 - 腿部机器人正在出现,并且非常需要腿部的机车,这需要精确的腿部运动动力学来执行控制命令或计划运动轨迹。本文提出了在线状态估计,以确定具有任意腿部数量的机器人的腿部运动学,其中包括腿部变换,时间偏移和腿链路长度的运动学参数。尤其是我们主张一个地面舞蹈步态,以进行运动学的决心,脚趾在地面上保持静态并充当大满贯中的静态地标。作为视觉惯性传感器通常在机器人机器人上可用,并且位于浮动基础上,我们利用有效的基于MSCKF的视觉惯性导航来估计腿部运动学。为此,我们通过分析得出了腿部运动测量的分析,并将它们与视觉惯性测量紧密融合,以更新腿的运动学和身体运动。在模拟和实验中,该方法已通过不同的四倍体进行了广泛的验证,显示出其稳健性和准确性。

lista:在混乱环境中基于几何对象的变更检测
摘要 - 我们介绍Lista(LiDAR时空时空肛门),这是一个系统,可使用Multi-Mession Slam检测概率对象级变化。许多应用程序需要这样的系统,包括施工,机器人导航,长期自治和环境监控。我们专注于在数周或几个月内添加,减去或更改对象的半静态场景。我们的系统结合了使用学识渊博的描述符来跟踪一组开放的对象的多态度激光雷达大满贯,体积差异,对象实例描述和对应分组。任务之间的对象对应关系是通过聚类对象的描述符来确定的。我们使用在模拟环境中收集的数据集和使用安装在四倍的机器人上的LIDAR系统捕获的现实世界数据集来证明我们的方法,该数据集捕获了一个固定,半静态和动态对象的工业设施。与现有方法相比,我们的方法在检测半静态环境的变化方面表现出了卓越的性能。
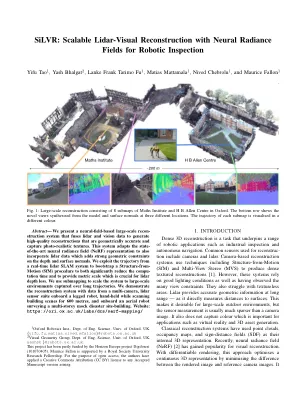
SILVR:可伸缩的LIDAR-VISUAL-VISUAL RETUSTRUTION,具有机器人检查的神经辐射场
摘要 - 我们提出了一个基于神经场的大规模重构系统,该系统融合了激光雷达和视力数据,以生成几何准确的高质量重建,并捕获光真逼真的纹理。该系统适应了状态的神经辐射场(NERF)表示,还结合了LiDAR数据,该数据在深度和表面正常上增加了强大的几何约束。我们利用轨迹从实时激光雷达大满贯系统来引导结构 - 从运动(SFM)程序进行启动,以显着降低组合时间,并提供对大暴力深度损失至关重要的度量标准。我们使用沉积将系统扩展到在长轨迹上捕获的大规模环境。我们通过来自多台摄像机,LIDAR传感器套件的腿部机器人的数据,在扫描600米的扫描建筑场景时进行手持式机器人,并在船上进行空中机器人,调查多层模拟模拟灾难现场建造的空中机器人。网站:https://ori.ox.ac.uk/labs/drs/nerf-mapping/

FEPSAC国会2024最终Abstractbook.pdf
在冬季奥运会和2012年的第一届青年奥运会冬季运动会上是对竞争运动和欢乐的迷恋的辉煌庆祝活动。在2020年,因斯布鲁克(Innsbruck)主持了世界上最大的冬季体育节冬季世界大师赛游戏,将精英运动员和爱好者召集在一起。鉴于因斯布鲁克(Innsbruck)在主机下的表现效果的遗产,它是参与讨论并介绍运动和表现心理学领域的最新研究和应用的理想场所,特别关注“在压力下的表现”。我们对这次国会的愿景是通过将科学严谨性与实际相关性结合在一起的程序来推进这一主题。我们致力于以出色的主题演讲者为特色,令人着迷的研讨会,动手讲习班以及个人口头和海报演示。此外,我们很高兴能引入科学的大满贯和一个应用的猛击,以进一步吸引我们的产品。我们从尊敬的同事那里得到了压倒性的积极回应,他们慷慨地同意加入科学和应用委员会。此外,我们正在与领先的体育和表现心理学领域的领先国家和国际协会进行积极合作,以表明国会的形象。

生物学课程清单Biol 1106 General ...
生物学课程列表生物学1106常规生物学I实验室(1)生物科学中的实验室方法,针对细胞的结构和功能。truncomite:Biol 1306。秋季,春季生物学1107常规生物学II实验室(1)实验室方法,用于研究生物体的结构,功能和环境。truncomite:Biol 1307。秋季,春季生物学1108非科学专业的生物学实验室(1)实验室将提供实用和互动的实验,并证明Biol 1308涵盖的概念。生物学专业和未成年人不能代替生物学1108代替生物学1106或1107。Biol 1108不能用作任何高级生物学课程的先决条件。主题:生物1308。秋季,春季生物1306常规生物学I(3)生物科学简介,重点是细胞的结构,功能和生理学:遗传学和生物能学。生物学专业和未成年人的两个学期大一新生生物学序列,以及所有需要大满贯生物学序列的学科,尽管所有专业的学生都可以将其符合通识教育科学的要求。没有先决条件。主题:生物1106。秋季,春季生物学1307常规生物学II(3)生物科学简介,重点是生物体的生物学,它们的进化和环境。生物学专业和未成年人的两学期大一新生生物学序列以及所有需要大满贯生物学序列的学科,尽管所有专业的学生都可以将其符合通识教育科学的要求。先决条件:学生必须至少通过C. Acustiques:Biol 1107。秋季,春季生物学1308非科学专业的生物学(3)调查适用于生物体的基本原理。这些包括细胞结构和功能,遗传学,进化,生理,生物多样性和生态学。生物学专业和未成年人不能代替生物学1308代替生物学1306或1037。Biol 1308不能用作任何高级生物学课程的先决条件。没有先决条件。truncomite:Biol 1108。秋季,春季生物学2121入门微生物学实验室(1)用于研究和鉴定微生物的基本技术简介。护理专业;不会被生物学专业或未成年人接受,也不会遇到医学或任何其他博士学位的本科生先决条件。主题:生物2320。秋季,春季生物学2320介绍性微生物学(3)微生物学简介,重点是微生物生长,诊断,由微生物引起的传染病和宿主防御。护理专业;不会计算生物学
像蝙蝠一样窃听:融合主动和被动的声纳,以同时定位和映射案例研究
在使用自我产生的信号的如此称为活跃的传感器中,声纳传感器的实现比LIDAR和雷达更具挑战性,部分原因是它们有限的角度传感场。对此挑战的一种常见解决方案是扫描传感器,该传感器通过连续测量扫描角度范围。然而,扫描传感器对声纳特别概率,因为声速相对较慢和声纳头的惯性。对蝙蝠行为的研究表明,蝙蝠可以在小组飞行过程中窃听其特异性。换句话说,他们将自己的活跃声纳收集的信息与他们通过被动倾听同龄人收到的信息融合在一起。由于蝙蝠非常擅长使用声纳,因此这种行为激发了对融合积极和被动声纳是否可以解决实现声纳传感器的挑战的调查。定义了融合传感的模型,并使用数值模拟来回答同时定位和映射的测试床问题(SLAM)。模拟结果表明,当活动声纳和相关噪声的角度范围相对较小时,机器人在解决大满贯方面的性能就会得到改善。