机构名称:
¥ 1.0
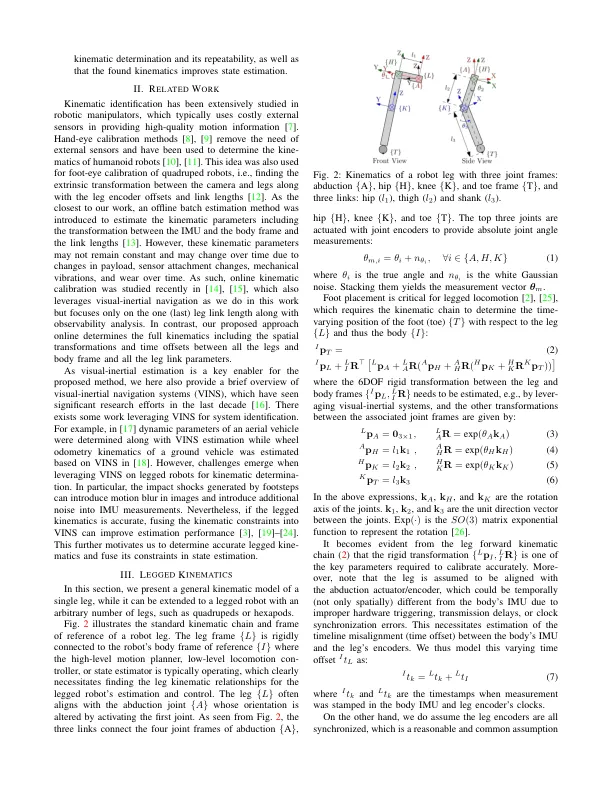
摘要 - 腿部机器人正在出现,并且非常需要腿部的机车,这需要精确的腿部运动动力学来执行控制命令或计划运动轨迹。本文提出了在线状态估计,以确定具有任意腿部数量的机器人的腿部运动学,其中包括腿部变换,时间偏移和腿链路长度的运动学参数。尤其是我们主张一个地面舞蹈步态,以进行运动学的决心,脚趾在地面上保持静态并充当大满贯中的静态地标。作为视觉惯性传感器通常在机器人机器人上可用,并且位于浮动基础上,我们利用有效的基于MSCKF的视觉惯性导航来估计腿部运动学。为此,我们通过分析得出了腿部运动测量的分析,并将它们与视觉惯性测量紧密融合,以更新腿的运动学和身体运动。在模拟和实验中,该方法已通过不同的四倍体进行了广泛的验证,显示出其稳健性和准确性。
在线确定腿部运动学
主要关键词


相关文件推荐