机构名称:
¥ 1.0
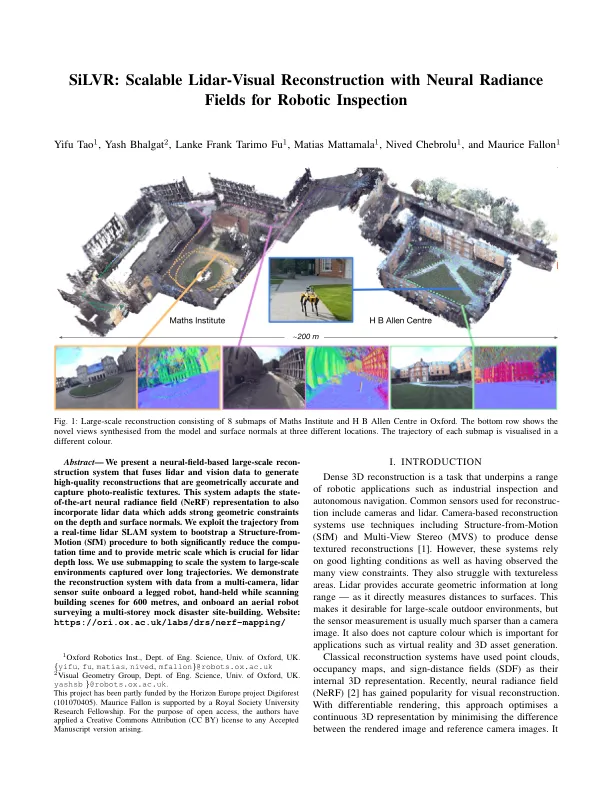
摘要 - 我们提出了一个基于神经场的大规模重构系统,该系统融合了激光雷达和视力数据,以生成几何准确的高质量重建,并捕获光真逼真的纹理。该系统适应了状态的神经辐射场(NERF)表示,还结合了LiDAR数据,该数据在深度和表面正常上增加了强大的几何约束。我们利用轨迹从实时激光雷达大满贯系统来引导结构 - 从运动(SFM)程序进行启动,以显着降低组合时间,并提供对大暴力深度损失至关重要的度量标准。我们使用沉积将系统扩展到在长轨迹上捕获的大规模环境。我们通过来自多台摄像机,LIDAR传感器套件的腿部机器人的数据,在扫描600米的扫描建筑场景时进行手持式机器人,并在船上进行空中机器人,调查多层模拟模拟灾难现场建造的空中机器人。网站:https://ori.ox.ac.uk/labs/drs/nerf-mapping/
SILVR:可伸缩的LIDAR-VISUAL-VISUAL RETUSTRUTION,具有机器人检查的神经辐射场
主要关键词

相关文件推荐