机构名称:
¥ 3.0
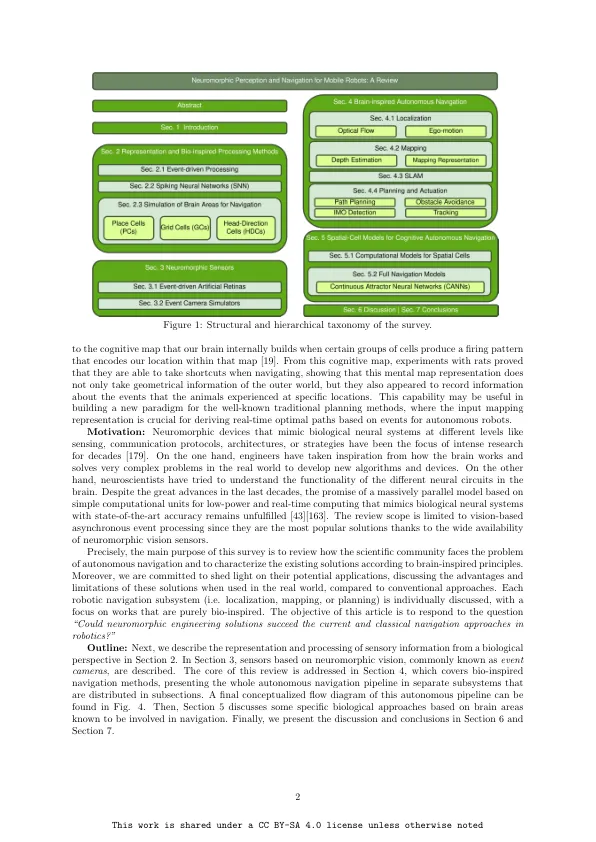
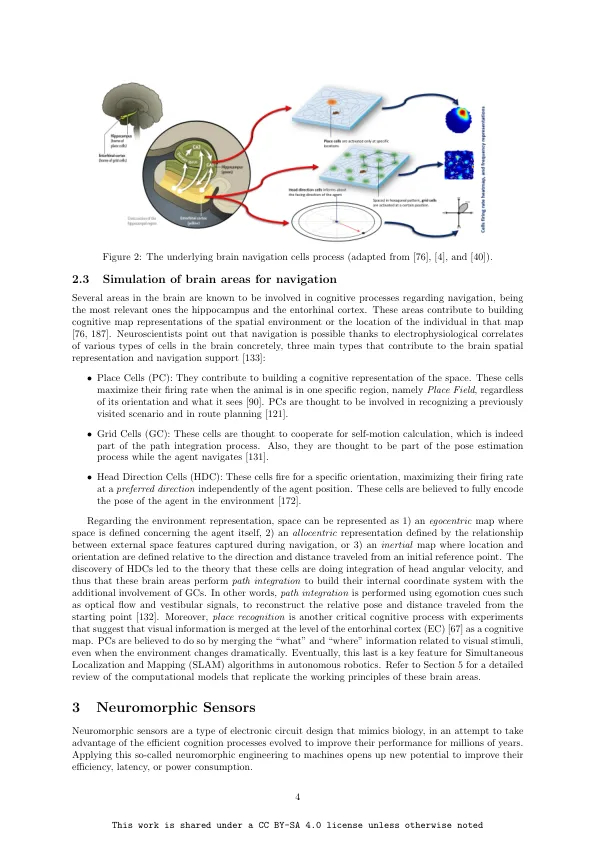
随着机器人技术和人工智能的快速和不可阻挡的演变,在现实世界中有效的统一导航已成为文献中最紧迫的挑战之一。但是,苛刻的要求,例如实时操作,能源和构成效率,鲁棒性和可靠性,使最新的解决方案不适合现实世界中的挑战。因此,研究人员被迫寻求创新的方法,例如生物启发的解决方案。的确,动物具有有效感知,理解和浏览其非结构化环境的内在能力。这样做,他们在认知过程中利用自我运动提示,本体感受和视觉流程来绘制其环境并将自己定位在其中。计算神经科学家的目的是回答“如何”和“为什么”这种认知过程发生在大脑中,以设计模仿生物学处理的新型神经形态传感器和方法。这项调查旨在全面审查脑启发策略在自主导航中的应用,考虑:神经形态感知和异步事件处理,能量和适应性学习,或模仿大脑领域的工作原理,在导航中起着至关重要的作用,例如hippococappampumant或hippocappampumant nectorhinal cort cort cort cort cort cort cort cort cort cort cort cort cort。
移动机器人的神经形态感知和导航
主要关键词



相关文件推荐