机构名称:
¥ 1.0
引言 在以人为中心的非结构化环境中使机器人和自主系统更加智能是机器人技术的关键目标之一,这也使其成为最具活力的技术发展领域之一。这种智能的关键因素是能够良好且快速地理解复杂而动态的环境,以可靠地支持其他功能,如运动规划和控制;与人类、物体和其他智能体的安全交互;以及从经验中自主学习。神经网络和数据驱动的训练算法为理解环境打开了两个重要窗口:图像和声音处理 (1)。这些算法在大量数据集上实现了最先进的性能,通常甚至超过人类的表现,是实现机器人智能感知和行为的主要候选者 (2)。然而,机器人用例对人工智能 (AI) 算法的功耗、延迟、自适应性和数据效率提出了尤为严格的要求 (3、4)。如今,尽管基于神经网络的算法与之前手工制作的人工智能解决方案相比具有优势(5、6),但我们仍然缺乏真正智能、敏捷的机器人,能够在日常生活中安全、顺畅地与物体、彼此和人类互动。这与即使是简单的动物也能产生智能行为并在复杂的现实环境中互动形成了鲜明的对比。动物可以快速
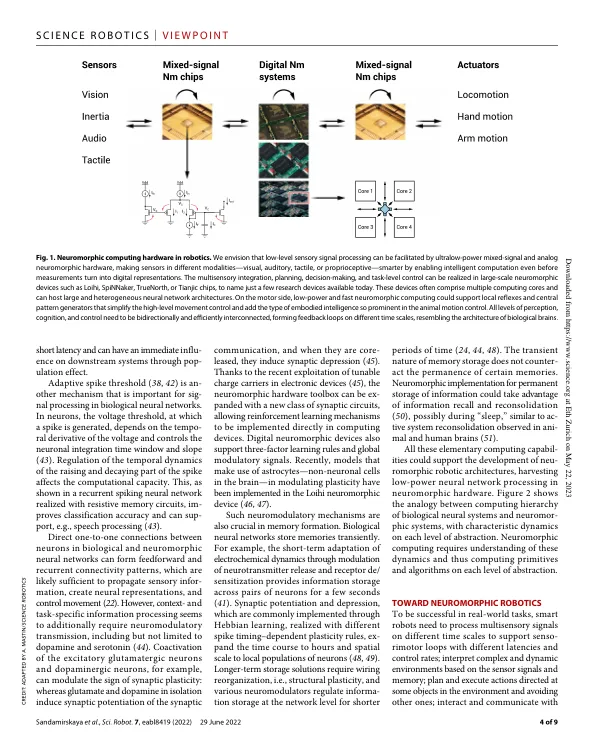
用于机器人的神经形态计算硬件和神经架构
主要关键词




相关文件推荐