机构名称:
¥ 1.0
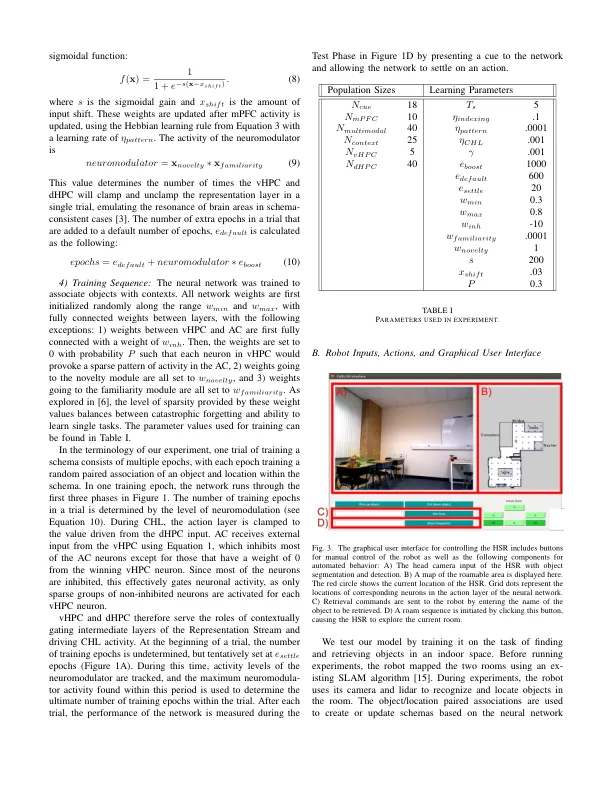
摘要 — 在多种环境下运行的机器人必须开发稳定且灵活的任务和环境相关表示。从神经生物学中汲取灵感,我们应用了图式和记忆巩固的神经网络模型来训练丰田人类支持机器人在室内环境中查找和检索物体。我们将图式定义为由共同上下文绑定在一起的物体集合。在这种情况下,机器人必须根据通常在这些房间中发现的物体来学习与学校房间相关的图式。由于该模型为每个房间开发了图式表示,因此机器人可以快速执行与熟悉图式相关的物体检索任务,并根据上下文消除任务歧义。我们的实验探索了该模型在具体环境中的效果,并展示了将记忆巩固研究应用于机器人情境感知的好处。索引词 — 记忆巩固、学习情境、认知机器人、神经调节、神经机器人、图式
机器人情境意识的神经生物学模式模型
主要关键词




相关文件推荐