XiaoMi-AI文件搜索系统
World File Search System子系统

adeo-n - 可部署的被动脱轨帆子系统启用空间碎片
濒临灭绝,甚至在未来几年未引入有效解决方案时,可能会因某些高度而被拒绝。尤其是大于1 cm的碰撞碎片将成为碎屑种群中的主要部分。因此,为了确保未来太空飞行的安全性,卫星和上阶段的有效寿命消失变得不可避免(ESA [1]和ESA [2])。然而,将来可能必须在25年的时间内确保轨道上的轨道,以保留允许空间飞行的轨道环境。当前的考虑假定需要少于5年的目标。用于在狮子座(例如卫星或火箭物体)中取消对象的渗透,适用了几种概念。最明显,最经济的一种是被动去驱动,这意味着让物体的轨道轨道衰减(EOM)自然衰减(EOM),直到重新进入,这限制了轨道高度以使任务遵守合理的放电时间。一种替代方法是一种主动的去除措施。目前,许多航天器使用活动推进器系统进行受控的重新进入,这增加了不需要的显着额外质量,有时甚至是复杂性,因为额外的推进剂以及需要指导,导航和控制(GNC)系统,以确保在Deorbit Maneuver过程中以所需的方向在所需的方向上行动。额外的质量和复杂性不能执行航天器的初始任务。如果出现故障,将不会在规定的时间内进行解开。[3])。主动推进器脱轨系统的最大缺点是其寿命终止(EOL)推进系统和GNC在EOM之后仍需要运行到轨道上约10 - 15年。缓解的有希望的未来设计目标可能是使用被动和独立的工作系统,以确保即使卫星出乎意料地出现故障,仍然可以执行可靠的轨道。此外,可以将被动解决方案构成,以便比相关的额外卫星控制系统要比额外的推进剂且复杂的质量较轻。同样,如果某个任务要求使用一个主动系统,则可以考虑使用被动系统的冗余,以便完全确保将来的空间任务的野心避免或加速进入大气。阻力增强设备(也称为“拖航”)正在使用Leos中存在的残留地球气氛(Vincent等人。为了启用De-Orbit操纵,部署了一个大表面
多毛细管 X 射线光学基础、应用和子系统
• 每个光学元件有亚百万到数百万个毛细管通道 • 每个通道都与同一点(焦点)对齐 • 焦点位于光学元件的输入侧和输出侧 • 光学元件提供较大的收集角度,从而产生高输出 X 射线通量 • 多毛细管光学元件不是成像光学元件 • 焦点尺寸小至 5 微米 • 提供的通量密度比针孔高出五个数量级
内存子系统在实现AI PC效率方面的作用
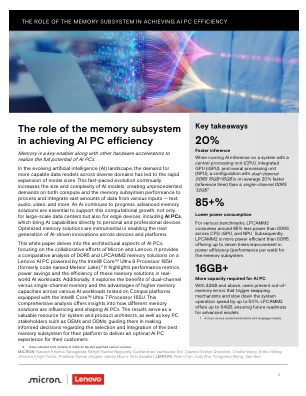
在不断发展的人工智能(AI)景观中,对跨不同领域的功能更强大的数据模型的需求导致模型大小的快速扩展。这种快节奏的进化不断增加AI模型的大小和复杂性,从而对计算和内存子系统的性能提出了前所未有的需求,以处理和整合来自各种输入的大量数据 - 文本,音频,视频等。随着AI的继续进步,高级内存解决方案对于支持这种计算增长至关重要,不仅对于大型数据中心,而且对于包括AI PC在内的边缘设备,它们将AI功能直接带给个人和专业设备。优化的内存解决方案有助于跨设备和平台进行下一代AI驱动的创新。
内存子系统在实现AI PC效率方面的作用
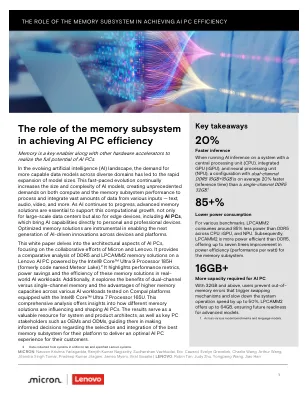
在不断发展的人工智能(AI)景观中,对跨不同领域的功能更强大的数据模型的需求导致模型大小的快速扩展。这种快节奏的进化不断增加AI模型的大小和复杂性,从而对计算和内存子系统的性能提出了前所未有的需求,以处理和整合来自各种输入的大量数据 - 文本,音频,视频等。随着AI的继续进步,高级内存解决方案对于支持这种计算增长至关重要,不仅对于大型数据中心,而且对于包括AI PC在内的边缘设备,它们将AI功能直接带给个人和专业设备。优化的内存解决方案有助于跨设备和平台进行下一代AI驱动的创新。

电子-正电子系统中真正的多体纠缠和量子相干性:相对论
过去二十年,科学界不断努力寻求更好的量子资源协方差框架,重点主要放在量子纠缠上。在这项工作中,我们通过分析洛伦兹增强下真正的多体纠缠和量子相干性的行为,将讨论向前推进了一步。具体来说,我们对叠加多体纯态中产生的电子-正电子对问题进行了案例研究。我们的方法与标准处理的不同之处还在于,我们考虑了四动量的所有成分,从而允许检查在这些自由度之间也可以编码纠缠的场景。我们的分析揭示了这个问题中有趣的微妙之处,比如实验室框架中的真正 4 体纠缠在洛伦兹增强框架的视角下转变为真正的 8 体纠缠加上量子相干性。此外,这些量子资源的给定组合被证明会形成洛伦兹不变量。尽管我们的研究结果无法通过第一原理确定信息论洛伦兹不变量,但它们为沿着这条路线进行根本性突破铺平了道路。

任意子系统中多体非厄米趋肤效应的动态抑制
非厄米趋肤效应 (NHSE) 是非平衡系统中一种令人着迷的现象,其中本征态大量局限于系统边界,将系统中加载的(准)粒子单向泵送到边界。最近,它与多体效应的相互作用得到了广泛的探索,并且已经证明粒子间排斥或费米简并压力会限制 NHSE 在其本征解和动力学中引起的边界积累。然而,在这项工作中,我们发现任意子统计数据可以更深远地影响 NHSE 动力学,抑制甚至逆转状态动力学朝着 NHSE 的局部方向。当涉及更多粒子时,这种现象更加明显。该系统中量子信息的传播显示出更加奇特的现象,其中 NHSE 仅影响热集合的信息动力学,而不会影响单个初始状态。我们的研究结果为探索由 NHSE 与任意子统计之间的相互作用引起的新型非厄米现象开辟了一条新途径,并有可能在超冷原子量子模拟器和量子计算机中得到证明。

使用算子幺正分解对开放量子系统进行量子模拟
现实物理和化学系统中的电子传输通常涉及与大环境进行非平凡的能量交换,这需要定义和处理开放量子系统。由于开放量子系统的时间演化采用非幺正算子,因此开放量子系统的模拟对于仅由幺正算子或门构成的通用量子计算机提出了挑战。这里,我们提出了一种通用算法,用于在量子设备上实现任何非幺正算子对任意状态的作用。我们表明,任何量子算子都可以精确分解为最多四个幺正算子的线性组合。我们在零温度和有限温度振幅阻尼通道中的两级系统中演示了这种方法。结果与经典计算一致,显示出在模拟中期和未来量子设备上的非幺正操作方面的前景。

IBM系统存储DS3500和EXP3500存储子系统:安装,用户和维护指南
第1章简介。。。。。。。。1此版本中有什么新功能。。。。。。。。。。2 DS3500存储子系统概述。。。。。。2 EXP3500存储外壳概述。。。。。。3个文档中的通知和语句。。。。。4个功能和操作规格。。。。。。4型和可选设备。。。。。。。。。6个操作系统支持。。。。。。。。。。7个产品更新。。。。。。。。。。。。。8最佳实践指南。 。 。 。 。 。 。 。 。 。 8 DS3500存储子系统和EXP3500存储外壳组件。 。 。 。 。 。 。 。 。 。 。8最佳实践指南。。。。。。。。。。8 DS3500存储子系统和EXP3500存储外壳组件。。。。。。。。。。。9个磁盘驱动器和边框。。。。。。。。。。10个控制器。。。。。。。。。。。。。12个环境服务模块。。。。。。。13交流电源和风扇单元。。。。。。13 DC电源和风扇单元。。。。。。14个电池单位。。。。。。。。。。。。。15软件和硬件兼容性和升级15软件和固件支持代码升级15确定固件级别。。。。。。。17规格。。。。。。。。。。。。。。17区域要求。。。。。。。。。。。17温度和湿度。。。。。。。。19声噪声。。。。。。。。。。。。20个电气要求。。。。。。。。。21热量输出,气流和冷却。。。。。。22
Vivado Design Suite用户指南:使用IP集成器设计IP子系统
引用一个模块........................................................................................................................................................................................................................................................................................................................................................................................................................... XCI推论..................................................................................................................................................... RTL Module..............................................................251 Inferring Control Signals in a RTL Module........................................................................... 252 Inferring AXI Interfaces..........................................................................................................256 Prioritizing Interfaces for Automatic Inference...................................................................259 HDL Parameters for Interface Inference..............................................................................261 Editing the RTL Module After Instantiation......................................................................... 267 Module Reference in a Non-Project Flow.............................................................................269 x_module_spec属性..................................................................................................................................................................................................................................................................................................... 270重复使用一个模块参考的块设计.................................功能.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................

热且致密的相对论费米子气体子系统中的量子重子数涨落
多体系统(微观和宏观)中的统计涨落对物理学有着非常重要的作用,因为它们编码了关于可能的相变、耗散和聚集现象的关键信息[1-6]。涨落的一个尚未开发的新特征是,在量子效应变得重要的情况下,小系统的涨落会增加。我们在最近的两篇论文[7、8]中定量分析了这种影响,在这些论文中,我们讨论了玻色子和费米子热气体中能量密度的涨落。我们的结果表明,在描述重离子碰撞时,相对论流体动力学中使用的流体元素概念存在局限性。当子系统的尺寸降至约0.5 fm以下时,能量密度涨落(对于温度和粒子质量的典型值)变得如此之大,以至于它们与它们的平均值相当。在这种情况下,具有明确能量密度的流体单元的物理图像变得不合理。我们