XiaoMi-AI文件搜索系统
World File Search System实际环境

学习在实际环境中有效,精确地导航
在陆地机器人自主导航的背景下,创建用于代理动力学和感官的现实模型是机器人文献和商业应用中的广泛习惯,在该习惯中,它们用于基于模型的控制和/或用于本地化和映射。另一方面,较新的AI文献是在模拟器或Ai-thor的模拟器或端到端代理上进行训练的,在这种模拟器中,重点放在照相现实渲染和场景多样性上,但是高效率机器人动作具有较少的特权角色。所得的SIM2REAL差距显着影响训练有素的模型转移到真正的机器人平台。在这项工作中,我们探讨了在设置中对代理的端到端培训,从而最大程度地减少了Sim2real Gap,在感应和驱动中。我们的代理直接预测(离散的)速度命令,这些命令是通过真实机器人中的闭环控制维护的。在修改的栖息地模拟器中鉴定并模拟了真实机器人的行为(包括底盘的低级控制器)。探视和定位的噪声模型进一步促进了降低SIM2REAL间隙。我们在实际导航方案上评估,探索不同的本地化和点目标计算方法,并报告与先前的工作相比的性能和鲁棒性的显着增长。

研究和实际环境中与运动相关的胃扰动的评估:B
剧烈运动是令人不安的胃肠道完整性和功能的代名词,随后引发了全身免疫反应和与运动相关的胃肠道症状,这种疾病被确定为“运动诱导的胃胃综合征。”当运动压力和对齐的加重因子(即外在和内在)具有很大的幅度时,这些与运动相关的胃肠道扰动可能会导致临床意义的降低和健康影响。这可能解释了运动胃肠病学中探索性,机理和介入性研究的指数增长,以了解,准确测量和解释,预防或减轻运动诱发的胃肠道综合征的衰弱和健康后果。考虑到胃术研究的最新进展,人们一直强调,该地区发表的文献一直受到实质性实验局限性的影响,这些限制可能会影响将研究结果转化为实用应用程序和/或未来研究设计的准确性。这种观点方法论试图强调这些关注点,并提供了指导,以提高下一代运动胃肠病学研究的有效性,可靠性和鲁棒性。需要进行标准化的实验程序来准确解释研究发现,避免了误解(例如,反应量级的病理相关性)和夸大的结论(例如,干预研究结果的临床和实际相关性),这将支持更准确地转化为安全实践指南。这些方法上的问题包括参与者筛查和描述,劳累和施用热应激负荷,饮食控制,水合状态,食物和流体规定,昼夜节律变化,生物性别差异,对运动诱导的胃肠道综合征的既定标记,胃肠道症状的有效性,胃肠道症状的有效性评估工具和数据报告和数据报告。
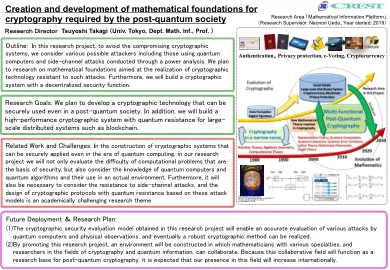
创建和发展后量子社会所需的密码学数学基础
相关工作与挑战:在构建即使在量子计算时代也能安全应用的密码系统时,我们的研究项目不仅会评估作为安全基础的计算问题的难度,还会考虑量子计算机和量子算法的知识及其在实际环境中的使用。此外,还需要考虑对侧信道攻击的抵抗力,基于这些攻击模型设计具有量子抵抗力的密码协议是一个具有学术挑战性的研究课题。

一项关于基于模型的强化学习的调查
抽象的增强学习(RL)与环境相互作用,以通过反复试验解决顺序决策问题。错误在现实世界中的应用程序总是不受欢迎的,即使RL擅长玩复杂的视频游戏,这些游戏允许进行多次试用和错误尝试。为了提高样本的效率并减少错误,基于模型的加固学习(MBRL)被认为是一个有前途的方向,因为它构建了可以在不产生实际成本的情况下进行反复试验的环境模型。在这项调查中,我们调查了MBRL,特别关注Deep RL的最新进展。在非尾环环境的学习模型与实际环境之间存在概括性误差。因此,至关重要的是要分析环境模型中的政策培训之间的差异,即在实际环境中,指导算法设计,以改善模型学习,模型利用和政策培训。此外,我们讨论了其他形式的RL,例如offline rl,目标条件的RL,多代理RL和Meta-RL的最新发展。此外,我们讨论了MBRL对现实世界任务的适用性和收益。最后,这项调查结束了关于MBRL未来发展前景的讨论。我们认为,MBRL在现实世界中具有巨大的潜力和利益,我们希望这项调查将鼓励对MBRL的更多研究。

评论探索局部解释实用工业人工智能应用:系统文献综述
摘要:近年来,已经开发了大量可解释的人工智能 (XAI) 用例,以解决工业应用中的许多实际问题,同时保持所使用的人工智能 (AI) 模型的可解释性水平,以判断其质量,并在模型损坏时可能追究其责任。因此,了解最先进的方法、指出最近的问题并得出未来的方向对于有效推动 XAI 研究非常重要。本文对局部解释技术及其在各个工业领域的实际应用进行了系统的文献综述。我们首先确定了对不透明 AI 模型的 XAI 的需求,并调查了工业 AI 应用的不同局部解释方法。然后从几个因素的角度检查研究数量,包括行业部门、AI 模型、数据类型以及基于 XAI 的用途和目的。我们还研究了局部解释方法的优缺点以及它们在实际环境中的效果。我们还介绍了使用局部解释技术的困难,包括计算复杂性以及精度和可解释性之间的权衡。我们的研究结果表明,局部解释技术可以提高工业 AI 模型的透明度和可解释性,并提供有关它们的深刻见解。必须提高这些程序的效率,并解决对其应用的道德问题。本文有助于增加对局部解释策略的了解,并为希望在实际环境中使用这些方法的学者和行业专业人士提供指导。

引用原始发表的论文(记录的版本):Wang,H.,Salunkhe,O.,Quadrini,W。等(2023)。计算机视觉技术的概述
线束是现代汽车车辆中电子系统的必不可少的硬件。随着汽车行业向电力和自动驾驶的转变,越来越多的汽车电子设备负责能源传输和关键安全功能,例如操纵,驾驶员援助和安全系统。此范式转移从安全角度来看,对汽车线束的需求更大,并强调了在车辆中高质量的线束组件的更重要性。但是,熟练的工人仍然手动执行电线线束组件的大多数操作,并且某些手动过程在质量控制和人体工程学方面都是有问题的。行业对提高竞争力并获得市场份额的需求也持续存在。因此,需要确保组装质量,同时提高人体工程学并优化人工成本。由机器人或人类机器人协作完成的机器人组装,是实现越来越苛刻的质量和安全性的关键推动力,因为它可以使比完全手动操作更具复制,透明和可理解的过程。然而,由于可变形物体的灵活性,在实际环境中,机器人的汇编组装在实际环境中具有挑战性,尽管在简化的工业结构下提出了许多初步的自动化解决方案。先前的研究E↵Orts提出了使用计算机视觉技术来促进线束组件的机器人自动化,从而使机器人能够更好地感知和操纵灵活的线束。本文介绍了针对机器人线束组件提出的计算机视觉技术的概述,并得出了需要进一步研究的研究差距,以促进更实用的机器人丝带线束。

IT基础架构管理:数字服务上下文
摘要管理IT基础架构对于组织有效提供数字服务至关重要。本研究的重点是解决与数字服务相关的复杂性,同时将最新技术纳入IT基础架构。为了有效地应对挑战,提出了四步方法。首先,必须全面了解工业问题。其次,应预测该领域的趋势和发展及其影响。第三,应制定方法和实践来解决IT基础架构的众多和复杂性所带来的挑战。最后,应在实际环境中评估所提出的解决方案。这项研究概述了接下来三年的博士研究的方法和暂定计划。
Quantum Vibes - 2023 年第三季度
量子传感器利用量子相干性和原子与光的纠缠,对环境高度敏感。它们对于计量仪器的制造至关重要,因为它们能够比任何传统对应物(如磁场、旋转、重力、加速度和时间流逝)进行更精确的量化。它们可用于制造便携式导航系统、原子钟和可以穿透障碍物的相机。它们还可用于制造绘制地下结构的设备,以及许多其他用途,这些用途有可能彻底改变交通、农业、能源等行业以及安全、医疗诊断和金融领域。然而,它们的商业和工业前景需要实现。然而,获得资金和关注来修改量子传感器以用于实际环境并非没有挑战。