XiaoMi-AI文件搜索系统
World File Search System容错能力
利用电路深度估计基态能量的量子算法对精度的依赖性呈指数级提高
量子计算领域的一个里程碑将是比最先进的经典方法更快地解决量子化学和材料问题。目前的理解是,要实现该领域的量子优势,需要一定程度的容错能力。虽然硬件正在朝着这一里程碑的方向改进,但优化量子算法也使其更接近现在。现有的基态能量估计方法成本高昂,因为它们需要每个电路的门数,而这些门数会随着所需精度位数的增加而呈指数增长。我们通过开发一种基态能量估计算法,将成本成倍降低,该算法的成本随着精度位数的增加而线性增长。相对于最近对工业相关分子碳酸乙烯酯和 PF − 6 的基态能量估计的资源估计,估计的门数和电路深度分别减少了 43 倍和 78 倍。此外,该算法可以使用额外的电路深度来减少总运行时间。这些特性使我们的算法成为在早期容错量子计算时代实现量子优势的有希望的候选算法。
物联网环境中能源管理的无线传感器网络模拟摘要“物联网”(IoT)是指
物联网环境中用于能源管理的无线传感器网络模拟 摘要 “物联网” (IoT) 一词指的是物理设备、传感器和控制器可以通过互联网进行通信的想法 [1]。众所周知,大多数物联网节点都受到能源限制,尤其是在无线网络中。本文提出了一种物联网环境中无线网络的模拟模型。模拟中使用了异构节点。本研究提出的模拟涉及三种技术。初始策略旨在最小化物联网环境中的数据传输。第二种方法规划了必要物联网节点的职责。第三种方法是最后一种方法,它为物联网节点中可能出现的能源相关问题提供容错能力。通过在物联网环境中实施这些策略,可以显著减少能源消耗。NS2 网络模拟器用于测试建议的模拟。模拟结果表明,就吞吐量、能耗率、数据包丢失和网络寿命而言,建议的方法优于已建立的物联网系统。

研究项目电路和互连...
植入式医疗设备 (IMD) 是安全关键型系统,具有极低的功率要求,用于不同医疗状况的长期治疗。 IMD 使用越来越多的组件(传感器、执行器、处理器、内存块),这些组件必须在片上系统 (SoC) 中相互通信。在该项目中,对不同类型的互连(点对点、总线、片上网络)进行了评估,考虑了它们的容错性、功耗和通信能力。作为产品的一部分,我们开发了一个可扩展的数据库,其中包含截至 2018 年文献中报道的植入式医疗系统,以便了解此类解决方案中电子系统的现状和趋势。基于这项初步研究,提出了一个互连评估框架,该框架包含一个拓扑生成器和设计流程,用于在模拟级别评估这些拓扑的功率和容错能力,同时提出了一个指标来比较预综合级别(设计整合之前)的不同架构。最后,将集成电路 (IC) 级设计和 IMD 定制互连解决方案的实施纳入定制微处理器设计中。该项目是在与荷兰伊拉斯谟医学中心(Erasmus MC)和乌拉圭天主教大学合作框架内开发的。

使用生物行为方法对驾驶员行为和攻击性进行建模 - 第一阶段
16.摘要 跟车、车道变换和间隙接受的数学模型大多是描述性的,缺乏决策或容错能力。包括有关行为和认知特征的额外驾驶员信息将解释这些缺乏的参数,并将人为因素纳入这些模型。跟车,特别是与智能驾驶员模型 (IDM) 相关的跟车,是本研究的主要组成部分。本研究的主要目标是调查如何建模心理生理结构以复制跟车行为,并将行为和攻击性的主观测量与实际跟车行为相关联。为了实现目标,需要完成以下任务:进行彻底的文献综述,制定方法框架,建立驾驶模拟器研究以收集相关数据,根据驾驶员的静态和行为特征对其进行分类,并校准 IDM。本报告介绍了本研究的第一部分,包括详尽的文献综述和将用于将生物行为参数纳入 IDM 的方法框架。执行该方法的数据收集计划包括使用驾驶模拟器从 90 名参与者收集驾驶数据,这将在项目的第二阶段完成。将在多个任务难度下执行各种跟车任务。这将提供有关驾驶员所经历的补偿和性能影响的数据。将对 IDM 进行修改,以纳入驾驶员类别、行为和性能之间观察到的任何趋势。
可再生能源五级前端转换器的回顾......
为了最大限度地减少环境和能源问题,分布式可再生能源在过去几十年中取得了显著的进步,尤其是风能和太阳能光伏发电,它们被视为现代电力系统发电的未来。将可再生能源整合到电力系统中需要使用先进的电力电子转换器,这对智能电网的范式提出了挑战,例如,提高效率、获得高功率密度、保证容错能力、降低控制复杂性以及缓解电能质量问题。本文对可再生能源应用的前端转换器(更具体地说是将可再生能源与电网连接的功率逆变器)进行了专门的回顾。值得注意的是,本文的目的并不是涵盖所有类型的前端转换器;重点仅放在基于电压源布置并允许电流或电压反馈控制的单相多级结构上,该结构仅限于五个电压电平。已建立的审查考虑了以下主要分类:(a)无源和有源功率半导体的数量;(b)容错特性;(c)控制复杂性;(d)特定无源元件(如电容器或电感器)的要求;(e)独立或分离直流链路电压的数量。整篇论文介绍了几种特定的五级前端拓扑结构,并对它们进行了比较,强调了每种拓扑作为可再生能源与电网接口候选者的优缺点。
使用生物行为方法对驾驶员行为和攻击性进行建模 - 第一阶段
16.摘要 跟车、车道变换和间隙接受的数学模型大多是描述性的,缺乏决策或容错能力。包括有关行为和认知特征的额外驾驶员信息将解释这些缺乏的参数,并将人为因素纳入这些模型。跟车,特别是与智能驾驶员模型 (IDM) 相关的跟车,是本研究的主要组成部分。本研究的主要目标是调查如何建模心理生理结构以复制跟车行为,并将行为和攻击性的主观测量与实际跟车行为相关联。为了实现目标,需要完成以下任务:进行彻底的文献综述,制定方法框架,建立驾驶模拟器研究以收集相关数据,根据驾驶员的静态和行为特征对其进行分类,并校准 IDM。本报告介绍了本研究的第一部分,包括详尽的文献综述和将用于将生物行为参数纳入 IDM 的方法框架。执行该方法的数据收集计划包括使用驾驶模拟器从 90 名参与者收集驾驶数据,这将在项目的第二阶段完成。将在多个任务难度下执行各种跟车任务。这将提供有关驾驶员所经历的补偿和性能影响的数据。将对 IDM 进行修改,以纳入驾驶员类别、行为和性能之间观察到的任何趋势。
使用 Steane 代码缓解退相干引起的量子比特误差和量子门误差
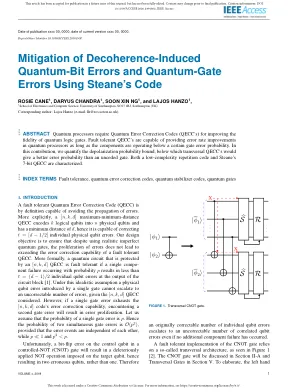
I. 引言 容错量子纠错码 (QECC) 按照定义能够避免错误传播。更明确地,[ n, k, d ] 最大-最小距离 QECC 将 k 个逻辑量子比特编码为 n 个物理量子比特,最小距离为 d,因此它能够纠正 t = [ d − 1 / 2] 个单独的物理量子比特错误。我们的设计目标是确保尽管使用了现实的不完美量子门,错误的扩散不会导致超出容错 QECC 的纠错能力。更正式地讲,如果单个组件以概率 p 发生故障,导致电路块输出端出现少于 t = ( d − 1) / 2 个单独的量子比特错误,则受 [ n, k, d ] QECC 保护的量子电路具有容错能力 [1]。在这个理想假设下,单个门引入的物理量子比特错误不会升级为无法纠正的错误数量,前提是考虑 [ n, k, d ] QECC。但是,如果单个门错误耗尽了 [ n, k, d ] 代码的纠错能力,遇到第二个门错误将导致错误扩散。我们假设单个门错误的概率为 p 。因此,两个同时发生的门错误的概率为 O ( p 2 ) ,前提是错误事件彼此独立,而 p ≪ 1 和 p 2 < p 。不幸的是,受控非 (CNOT) 门中控制量子比特的位翻转错误将导致有害的

fogros2-ft:容错的云机器人
摘要 - 云机器人技术使机器人能够将复杂的计算任务卸载到云服务器以进行性能和易于管理。但是,云计算可能是昂贵的,云服务可能会偶尔遭受停机时间,并且机器人和云之间的连接可能是网络服务质量(QoS)的变化。我们通过引入多云扩展名来自动复制独立的无状态机器人服务,将请求路由到这些副本,并指导第一响应回复,以减轻这些问题,以减轻这些问题。随着复制,即使云服务提供商降低或QoS较低,机器人仍然可以从云计算中受益。此外,许多云计算提供商提供了低成本的“点”计算实例,这些实例可能会无法预测。通常,这些低成本实例不适合云机器人技术,但是Fogros2-ft的容错性质可以可靠地使用它们。我们在模拟(视觉对象检测,语义分割,运动计划)和1个物理机器人实验(Scan-Pick-Pick-Pick-and-place)中,在3个云机器人方案中演示了FogroS2-FT的容错能力。在相同的硬件规范上运行,Fogros2-ft实现运动计划,最高2.2倍的成本降低,并在99%(P99)长尾潜伏期上降低了5.53倍。fogros2-ft在网络放缓和资源争议下,对象检测和语义分割的P99长尾延迟分别减少了2.0倍和2.1倍。视频和代码可在https://sites.google.com/view/fogros2-ft上找到。

基于动态信息分配的联邦过滤器...
多传感器组合导航在水下传感器网络中得到了广泛的应用,它提高了单传感器的跟踪精度,且具有较好的容错能力。多传感器数据融合有两种基本结构:集中式融合和分布式融合。集中式融合将所有数据收集到融合中心进行处理,因此不存在任何数据丢失,集中式融合是最优的,但集中式融合计算和通信负担过重,容错能力差。分布式融合近年来受到越来越多的关注。20世纪90年代,NA Carlson提出了联邦滤波器[1]。联邦滤波器由一个全局滤波器和若干个局部滤波器组成,各局部滤波器彼此独立,采用各自的滤波算法,处理各自的测量信息并生成局部的跟踪路径。全局滤波器只能融合局部滤波器生成的路径[2]。传统的联邦滤波器使用KF作为局部滤波器,这导致传统的联邦滤波器只能跟踪线性运动目标。但测量函数往往是非线性的,KF不能利用非线性信息,因此该算法采用UKF作为局部滤波器。此外,为了识别故障传感器,将动态信息分配设计为子滤波器协方差矩阵的迹与全局协方差矩阵的迹的比值。仿真结果表明,该算法能很好地跟踪非线性系统,且精度优于UKF算法,并且能放大子系统的软故障灵敏度,从而易于识别故障传感器。
使用 Steane 代码缓解退相干引起的量子比特误差和量子门误差
I. 引言 容错量子纠错码 (QECC) 按照定义能够避免错误传播。更明确地,[ n, k, d ] 最大-最小距离 QECC 将 k 个逻辑量子比特编码为 n 个物理量子比特,最小距离为 d,因此它能够纠正 t = [ d − 1 / 2] 个单独的物理量子比特错误。我们的设计目标是确保尽管使用了现实的不完美量子门,错误的扩散不会导致超出容错 QECC 的纠错能力。更正式地讲,如果单个组件以概率 p 发生故障,导致电路块输出端出现少于 t = ( d − 1) / 2 个单独的量子比特错误,则受 [ n, k, d ] QECC 保护的量子电路具有容错能力 [1]。在这个理想假设下,单个门引入的物理量子比特错误不会升级为无法纠正的错误数量,前提是考虑 [ n, k, d ] QECC。但是,如果单个门错误耗尽了 [ n, k, d ] 代码的纠错能力,遇到第二个门错误将导致错误扩散。我们假设单个门错误的概率为 p 。因此,两个同时发生的门错误的概率为 O ( p 2 ) ,前提是错误事件彼此独立,而 p ≪ 1 和 p 2 < p 。不幸的是,受控非 (CNOT) 门中控制量子比特上的位翻转错误将导致对目标量子比特施加有害的非操作,从而导致两个错误的量子比特,而不是一个。因此