XiaoMi-AI文件搜索系统
World File Search System对协



也协调为 PDC 1348 - 国防后勤局
IPC 2 -1754 WAM 1,航空航天和国防及其他行业的材料和物质声明,规定了供应商与其客户之间就可能存在于材料中的化学物质进行数据交换的要求,这些化学物质用于生产、操作、维护、维修或大修/翻新供应的产品或子产品。IPC-1754 将材料质量的计量单位定义为毫克 (mg)、克 (g)、千克 (kg)、百万分率 (ppm) 和质量百分比 (%)。

协变的stinespring定理-Bristol
使得f(x)= tr e(τxτ†)(在这里tr e:b(k⊗e)→b(e)是环境上的部分跟踪)。cp映射f是轨迹保留的,扩张τ是一个等轴测图。不同的扩张τ1:H→K⊗E1,τ2:H→K⊗E2与部分等距α:E 1→E 2相关。
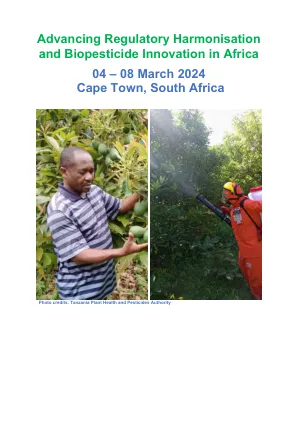
推进监管协调和生物农药...
背景生物农药(和生物控制剂)是可持续农业和综合害虫管理(IPM)策略中日益重要的工具的组成部分。与所有其他商业害虫防治产品一样,必须先对生物农药进行审查,然后才能注册并可以被农民使用。但是,这些非洲各个国家的植物保护产品的各种监管景观继续严重影响生物农药研究,开发和创新。因此,不仅有必要量身定制监管方法来满足大陆上各个国家的独特需求,而且还要协调整个地区的相关方面,以创建一个凝聚力的框架,以促进这些产品的有效注册和使用。支持和促进该领域的创新也是确保有效的生物农药解决方案的连续管道。一旦注册,就需要适当的产品管理,包括存储和处理,以确保这些产品在IPM工具包中保持有效的工具。目标研讨会汇集了监管专业人员,研究人员,行业专家和决策者,讨论了非洲生物农药注册指南的区域和大陆协调的各个方面。研讨会旨在不仅为参与者提供对非洲生物农药的监管景观的全面了解,而且还讨论了可能需要弥合可能需要弥补该地区生物农药研究,发展和创新的差距和挑战。研讨会就监管协调的理由,包括就协调过程的各个方面进行讨论,提供了对其实际含义和应用的见解。使生物农药注册更有效的方法,例如开发相互认可机制,以及最新的行业发展,区域经济社区的见解以及大陆指南发展的前景。应采用用于处理生物农药有效性的管理实践,包括安全准则以及如何将这些实践纳入IPM策略中。此外,研讨会将涵盖该行业内部的最新研究结果,监管经验和创新,旨在催化非洲生物农药行业的发展。研讨会议程
CPSINTAKE政策,协议和指导
1。使用记者使用基于优势的方法来完成NC快速或结构化进气报告工具的新CPS摄入量。2。咨询与指控相对应的虐待筛查工具。3。确定负责完成CPS评估的县。4。咨询响应优先级决策树。5。确定适当的评估响应类型(调查或家庭)。按照上述步骤,CPS的摄入过程确定报告的信息是否符合儿童虐待的法定指南。在筛选报告中(即符合法定要求)时,CPS的进气口确定负责评估,响应时间,响应类型的县,然后将报告分配给CPS评估。

可持续的商业模式:数字化、协作和……
donna.valenia@binus.ac.id 如何创建可持续的商业模式 对于 Superlativ 和 Gadget Review 总裁 Rex Freiberger 来说,可持续的商业模式是一种为每个参与者创造价值而不会耗尽创造价值的资源的模式。他补充道:“那些旨在利用趋势的商业模式是不可持续的,因为启动这些模式的社会资源在几年甚至几个月内就会消失。”塑料污染解决方案执行负责人莉亚·科拉贝洛 (Lia Colabello) 表示,可持续商业模式与优先考虑可持续性的商业模式之间存在差异。他说:“可持续的商业模式是每一位企业领导者的希望:企业能够快速盈利,并保持长期可行性。” “优先考虑可持续性的商业模式是一种至少考虑所有利益相关者、评估和解决环境影响并在报告中透明和全面的商业模式”(Geissdoerfer、Vladimirova 和 Evans,2018 年)。数字化如何支持可持续商业模式:文献综述