XiaoMi-AI文件搜索系统
World File Search System导航的

使用大语言模型进行体现导航的进步:调查
近年来,大型语言模型(LLM)的快速发展,例如生成的预训练的跨前者(GPT),由于它们在各种实际应用中的潜力而引起了人们的关注。LLM与体现智能的应用已成为重点的重要领域。在LLM的无数应用中,导航任务特别值得注意,因为它们要求对环境和快速,准确的决策有深刻的了解。llms可以增强具有复杂的环境感知和决策支持的体现的智能系统,利用其强大的语言和图像处理能力。本文提供了详尽的摘要,内容涉及LLMS与体现智能之间的共生,重点是导航。它回顾了最先进的模型,研究方法,并评估了现有体现导航模型和数据集的优势和缺点。最后,本文阐明了基于当前研究的LLM在具体智能中的作用,并预测了该领域的未来方向。本调查中的全面研究列表可在https://github.com/rongtao-xu/awsome-llm-en上找到。

用于免提机器人轮椅导航的自我中心计算机视觉
摘要 在本文中,我们介绍了一种导航机器人轮椅的方法,该方法为用户提供了多层次的自主性和导航能力,以满足他们的个人需求和偏好。我们主要关注三个方面:(i)以自我为中心的基于计算机视觉的运动控制,为手部使用受损的轮椅使用者提供自然的人机界面;(ii)使用户无需使用手即可启动到某个位置、物体或人的自主导航的技术;(iii)一个框架,该框架根据用户通常是主观的标准和偏好来学习导航轮椅。这些贡献在用户研究中进行了定性和定量评估,几名受试者证明了它们的有效性。这些研究都是针对健康受试者进行的,但它们仍然表明可以启动对所提出技术的临床试验。

用于航天器导航的全局快门固态闪光激光雷达
需要强大的相对导航系统和传感器来确保成功完成航天器与小天体(小行星、彗星)的自主会合操作、航天器近端/对接机动以及行星体进入、下降和着陆 (EDL) 任务。在过去 5 年内,全局快门闪光激光雷达已成为这些相对导航任务领域的首选传感器。与其他激光雷达模式相比,全局快门闪光激光雷达具有出色的尺寸、重量和功率 (SWaP) 性能,能够生成实时组织的点云并同时跟踪多个物体。首批使用由 Advanced Scientific Concepts LLC (ASC) 设计和制造的全局快门闪光激光雷达相对导航传感器的两个作战太空计划是 NASA/洛克希德马丁 OSRIS-Rex 和 NASA/波音的 CST-100 Starliner(载人航天运输)任务。 OSIRS-REx 任务尤其令人感兴趣,因为这是首次收集闪光激光雷达深空可靠性数据。
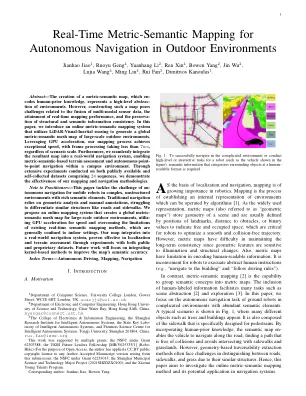
户外环境中自动导航的实时衡量标准映射
摘要 - 纳入人为优先知识的度量语义图的创建代表了环境的高级突出。然而,构建此类地图构成了与多模式传感器数据融合,实时映射性能的融合以及结构和语义信息一致性的保留相关的挑战。在本文中,我们引入了一个在线度量 - 语义映射系统,该系统利用LIDAR-Visual-Visual-Visual惯性传感生成了大型室外环境的全局度量标准网格地图。利用GPU加速度,我们的映射过程达到了出色的速度,无论场景尺度如何此外,我们将所得地图无缝地集成到现实世界中的导航系统中,从而实现了基于公制的语义地形评估和在校园环境中的自主点 - 要点导航。通过对包含24个序列的公共可用数据集进行的广泛实验,我们证明了映射和导航方法的有效性。对从业者的注释 - 本文在复杂的,非结构化的环境中应对具有丰富语义元素的复杂,非结构化环境中的移动机器人的竞争挑战。传统导航依赖于几何分析和手动注释,努力区分相似的结构,例如道路和人行道。我们的地图集成到现实世界中的导航系统中,通过与公共和专有数据集进行实验,可在本地化和地形评估中有效。索引条款 - 自主驾驶,映射,导航我们提出了一个在线映射系统,该系统为大型室外环境创建全局标准网格地图,利用GPU加速速度,并克服了现有的实时语义映射方法的限制,这些方法通常可以配置为室内设置。未来的工作将集中于整合基于内核的方法,以提高地图的语义准确性。

ASFM:腿部机器人社会导航的增强社会力量模型
摘要 - 机器人技术中的社会导航主要涉及通过人口掩护的区域指导移动机器人,并且行人舒适度与有效的途径进行平衡。al-尽管在该领域已经看到了进步,但解决机器人无缝集成到行人环境中的解决方案仍然难以捉摸。在本文中,开发了一种用于腿部机器人的社会力量模型,利用视觉感知来进行人类本地化。特别是引入了增强的社会力量模型,并结合了基于行人行动的排斥力量和回避行为的精致解释,以及目标以下机制。通过各种情况,包括与即将到来的行人,人群和阻塞路径的相互作用,对四足机器人进行实验评估,这表明,所提出的增强模型在先前的基线方法上以选择的路径长度,平均速度以及有效和有效的社交导航的时间来显着改善基线方法。代码是开源的,而视频演示可以在项目的网页上找到:https://rpl-cs-ucl.github.io/asfm/

用于自主视线导航的高精度星跟踪器算法的设计和仿真。⋆
深空立方体卫星正成为普通航天器的宝贵替代品。它们的开发可以标志着太空探索的新纪元,由于任务成本明显降低,为许多太空领域参与者拓宽了可能性。为了正确利用微型探测器,自主导航是必不可少的支柱。在此框架中,视线 (LoS) 导航是深空巡航期间状态估计的宝贵选择。视线导航是一种光学技术,基于对可见天体(例如行星)的观测,这些天体的星历表是众所周知的。这些天体的方向是通过机载光学仪器(照相机或星跟踪器)获得的,并在导航滤波器中将其与机载存储的星历表检索到的实际位置进行比较。在机载上执行完整估计程序的可能性使该技术成为自主深空立方体卫星的有效候选者。导航精度尤其取决于两个特性:观测几何和视线方向提取精度 [1]。第一个取决于任务场景,它定义了可见物体及其相对几何形状。第二个取决于成像硬件、图像处理算法以及任务几何形状。尽管可以稍微调整任务以在有利的观测几何窗口期间发生 [2],但通常它不够灵活,无法提高估计精度。因此,LoS 方向提取精度在整体导航性能中起着至关重要的作用。在此背景下,这项工作旨在正确生成合成星跟踪器图像,然后用于测试设计的 LoS 提取算法的性能。合成图像的生成取决于成像传感器和镜头的特性。对于星跟踪器,假设使用针孔相机模型。Hipparcos-2 目录用于检索可见恒星的方向,这些方向在传感器参考系中转换。恒星的视星等转换为传感器阵列上读取的光电子数量。此转换取决于传感器的特性(像素大小、填充因子、量子效率)、镜头直径和曝光时间。为了在恒星质心算法中达到亚像素精度,入射光被故意弄模糊,因此信息分散在不同的像素上。这是用高斯分布模拟的。行星的模拟不那么简单,因为形状和视星等都取决于观测几何。为了正确
安全智能车辆导航的操作设计域监视概述
摘要 - 智能车辆(IV)的运营安全是一个核心主题,也是许多研究项目的复杂问题。虽然在验证驾驶自动化系统的最可靠方法上尚未达成共识,但存在基于操作设计域(ODD)的规范的几种方法,例如基于方案的测试和实时操作域(OD)限制。在我们的案例中,我们将重点放在奇怪的概念作为IV的安全保证的作用上,以及如何与对其操作领域(OD)的实时监控相结合可以作为复杂移动系统的保障。我们建议分析在OD/ODD监测操作安全领域提出的相关文献,标准,作品和建议,并将它们组装为三类:首先涉及使用分类法和本体来代表车辆驾驶环境要素的使用;第二个涉及通过专用语言对奇数的形式定义。第三个问题是允许监视车辆OD以提高操作安全性的技术。通过从确定的方法中退后一步,我们突出显示如何以连贯的方式组合它们,以朝着符合奇数定义和OD/奇数监视的框架前进。

通过增强的PPO进行安全移动机器人导航的深度加固学习
摘要 - 无汇总运动对于移动机器人必不可少。大多数与车轮机器人无冲突和高效导航的方法都需要专家进行参数调整,以获得良好的导航行为。本研究调查了深入强化学习在复杂环境中训练移动机器人进行自动导航的应用。机器人利用激光雷达传感器数据和深度神经网络来生成控制信号,同时避免了障碍物。我们在凉亭仿真环境中采用两种强化学习算法:深层确定性政策梯度和近端政策优化。该研究在近端策略优化算法中引入了增强的神经网络结构,以提高性能,并具有精心设计的奖励功能,以提高算法效率。在障碍物和自由环境中进行的实验结果强调了拟议方法的有效性。这项研究通过应用深度强化学习,很大程度上有助于在复杂环境中提高自主机器人技术。索引术语 - 深处增强学习,自主航行,控制,避免障碍

地形数据库完整性监视器和地形参考导航的性能改进方法
摘要.............................................................................................................................................3
