机构名称:
¥ 1.0
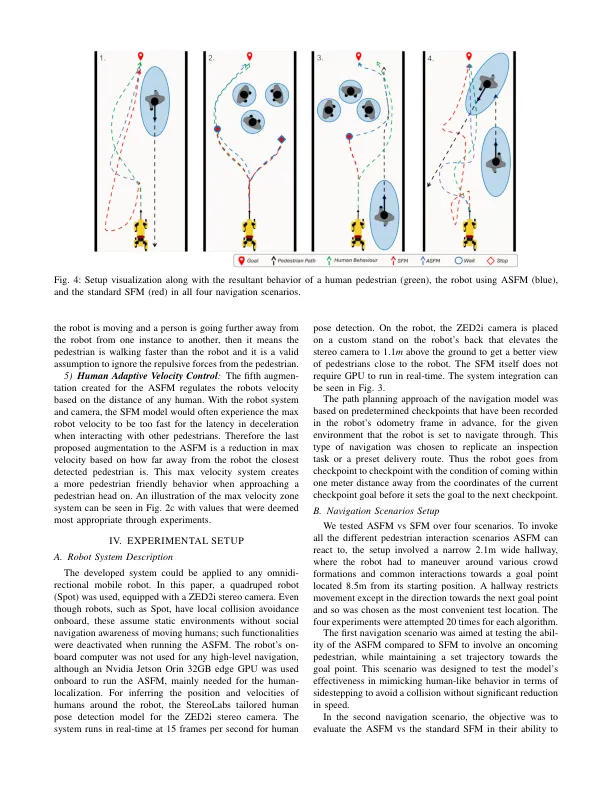
摘要 - 机器人技术中的社会导航主要涉及通过人口掩护的区域指导移动机器人,并且行人舒适度与有效的途径进行平衡。al-尽管在该领域已经看到了进步,但解决机器人无缝集成到行人环境中的解决方案仍然难以捉摸。在本文中,开发了一种用于腿部机器人的社会力量模型,利用视觉感知来进行人类本地化。特别是引入了增强的社会力量模型,并结合了基于行人行动的排斥力量和回避行为的精致解释,以及目标以下机制。通过各种情况,包括与即将到来的行人,人群和阻塞路径的相互作用,对四足机器人进行实验评估,这表明,所提出的增强模型在先前的基线方法上以选择的路径长度,平均速度以及有效和有效的社交导航的时间来显着改善基线方法。代码是开源的,而视频演示可以在项目的网页上找到:https://rpl-cs-ucl.github.io/asfm/
ASFM:腿部机器人社会导航的增强社会力量模型
主要关键词




相关文件推荐